
Mit einem Arduino bzw. ESP32 kann man sogar eine Wärmebildkamera basteln. Bei der Variante 1 wird die Temperatur mit dem Sensor MLX90614 Pixel für Pixel bestimmt, indem man den Sensor mittels zweier Servomotoren in viele verschiedene Richtungen orientiert. Bei der Variante 2 mit dem Sensor MLX90640 ist dies nicht mehr nötig, da der Sensor bereits über 32×24 Pixel verfügt. Leider brachte ich den MLX90640 mit einem Arduino nicht zum Laufen. Daher musste ich auf einen ESP32 ausweichen.
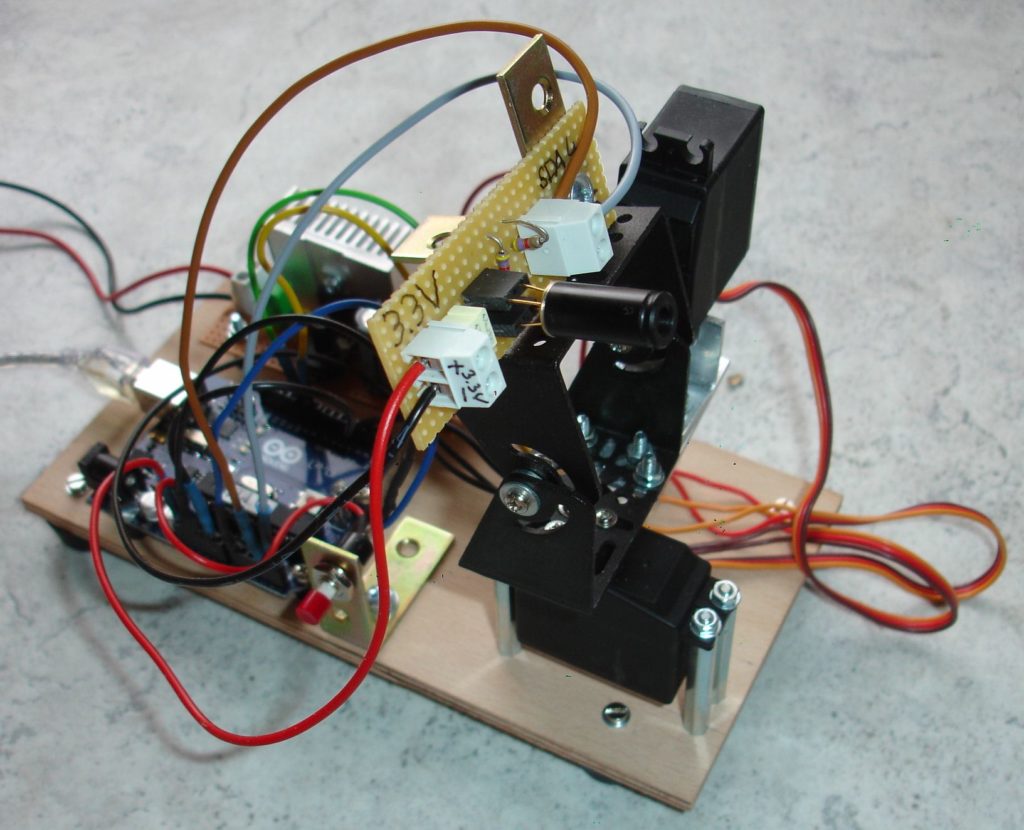
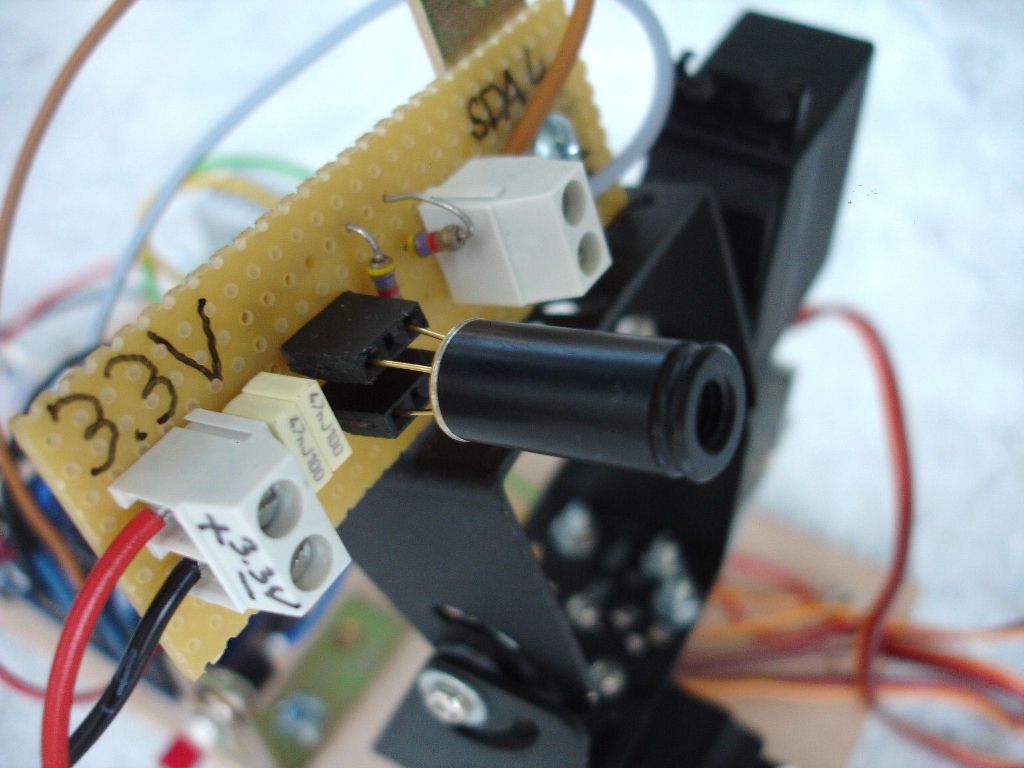
Variante 1: Sensor MLX90614
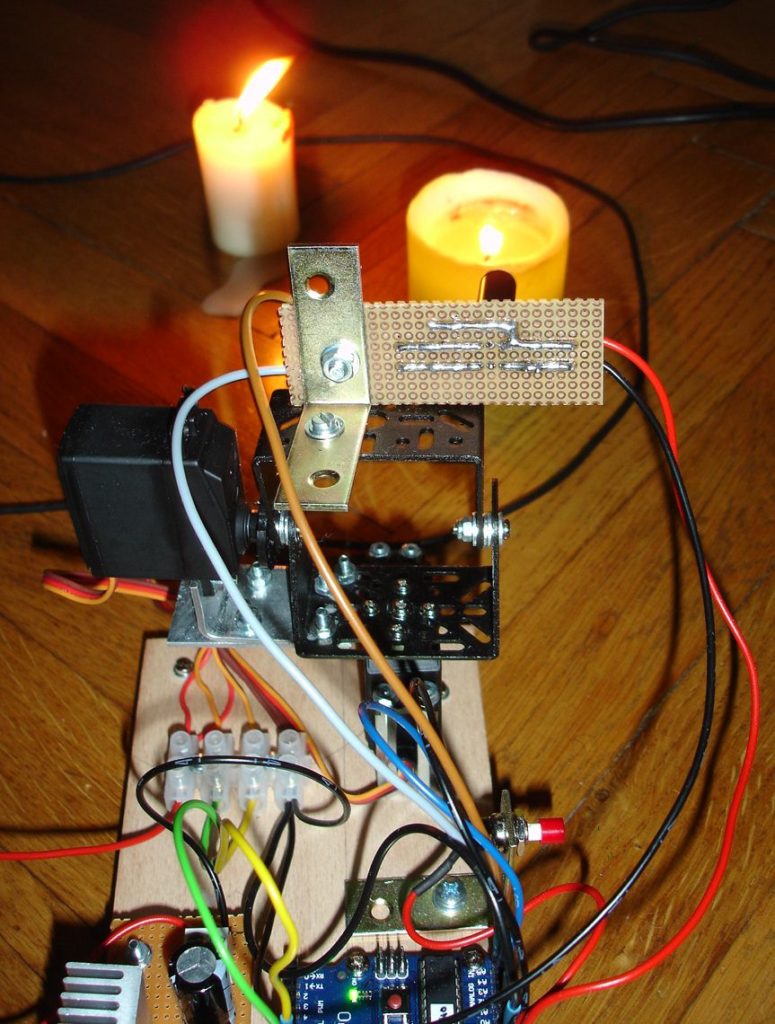
Dieser Sensor verfügt lediglich über 1 Pixel. Daher muss zur Aufnahme eines kompletten Wärmebildes der Sensor Schritt für Schritt in viele Richtungen ausgerichtet werden. Dies bedingt natürlich eine sehr große Messzeit. Bei 1 Sekunde pro Messung und einem Bild mit 40×40 Pixel dauert der Messvorgang immerhin bereits fast 27 Minuten.
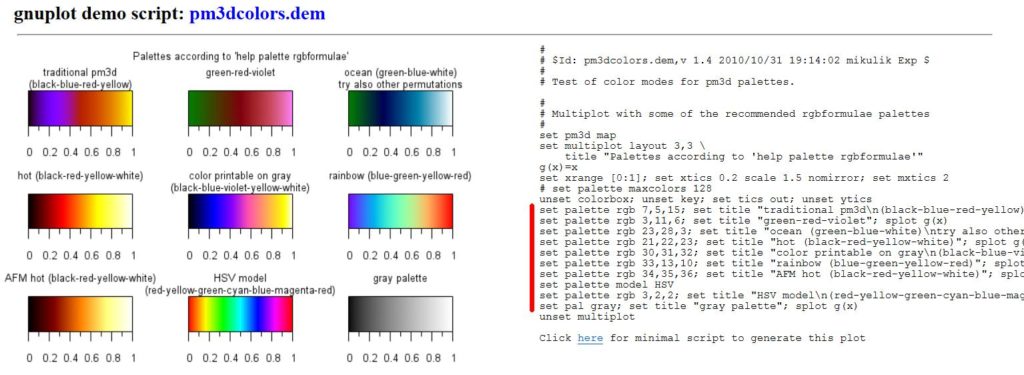
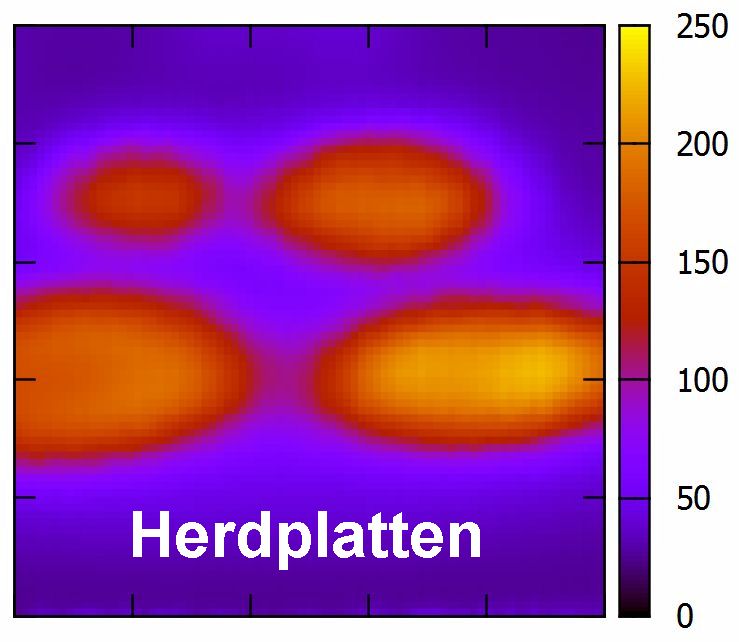
Die Temperaturwerte werden am Ende mit dem Grafikprogramm gnuplot eingefärbt, damit man ein anschauliches Wärmebild erhält.



Arduino-Code:
// =======================================================
// ====== Programm zur Erstellung eines Wärmebilds =======
// =======================================================
#include <Servo.h> // Inkludiert die Servodateien
#include <i2cmaster.h> // Inkludiert die i2c-Bus-Dateien
Servo servo_horiz; // Definiert den horizontalen servo
Servo servo_verti; // Definiert den vertikalen servo
int taste; // Tastaturpin für Start des Scans
int horiz_start = 90; // horizontaler Startwinkel
int verti_start = 20; // vertikaler Startwinkel
int schritte = 40; // horizontale bzw. vertikale Schritte
// ************************************
// ************** SETUP ***************
// ************************************
void setup()
{
Serial.begin(9600);
servo_horiz.attach(9); // Set horizontalen servo to digital pin 9
servo_verti.attach(10); // Set vertikalen servo to digital pin 10
pinMode(13, OUTPUT);
i2c_init(); //Initialisiert den i2c-Bus
PORTC = (1 << PORTC4) | (1 << PORTC5); //enable pullups
}
// ********************************************
// ************** HAUPTSCHLEIFE ***************
// ********************************************
void loop()
{
taste = analogRead(A0); // Abfrage, ob die Taste gedrückt wird und der Scan gestartet werden kann
servo_horiz.write(horiz_start);
servo_verti.write(verti_start);
if (taste > 500)
{
// ********** Messung gestartet ************
digitalWrite(13, HIGH); // set the LED on
delay(1000); // wait for a second
digitalWrite(13, LOW); // set the LED off
for (int i = horiz_start; i >= horiz_start - schritte; i--)
{
servo_verti.write(verti_start);
delay(150);
for (int j = verti_start; j <= verti_start + schritte; j++)
{
servo_horiz.write(i);
servo_verti.write(j);
delay(250);
int dev = 0x5A<<1;
int data_low = 0;
int data_high = 0;
int pec = 0;
i2c_start_wait(dev+I2C_WRITE);
i2c_write(0x07);
// Temperatur vom MLX90614 lesen
i2c_rep_start(dev+I2C_READ);
data_low = i2c_readAck(); // Read 1 byte and then send back
data_high = i2c_readAck(); // Read 1 byte and then send back
pec = i2c_readNak();
i2c_stop();
// This converts high and low bytes together and processes temperature, MSB is a error bit and is ignored for temps
double tempFactor = 0.02; // 0.02 degrees per LSB (measurement resolution of the MLX90614)
double tempData = 0x0000; // zero out the data
int frac; // data past the decimal point
// This masks off the error bit of the high byte, then moves it left 8 bits and adds the low byte.
tempData = (double)(((data_high & 0x007F) << 8) + data_low);
tempData = (tempData * tempFactor)-0.01;
float celcius = tempData - 273.15;
Serial.print(horiz_start - i);
Serial.print(" ");
Serial.print(j - verti_start);
Serial.print(" ");
Serial.println(celcius);
}
}
// ********** Messung beendet ************
digitalWrite(13, HIGH); // set the LED on
delay(1000); // wait for a second
digitalWrite(13, LOW); // set the LED off
servo_horiz.write(horiz_start);
servo_verti.write(verti_start);
}
}
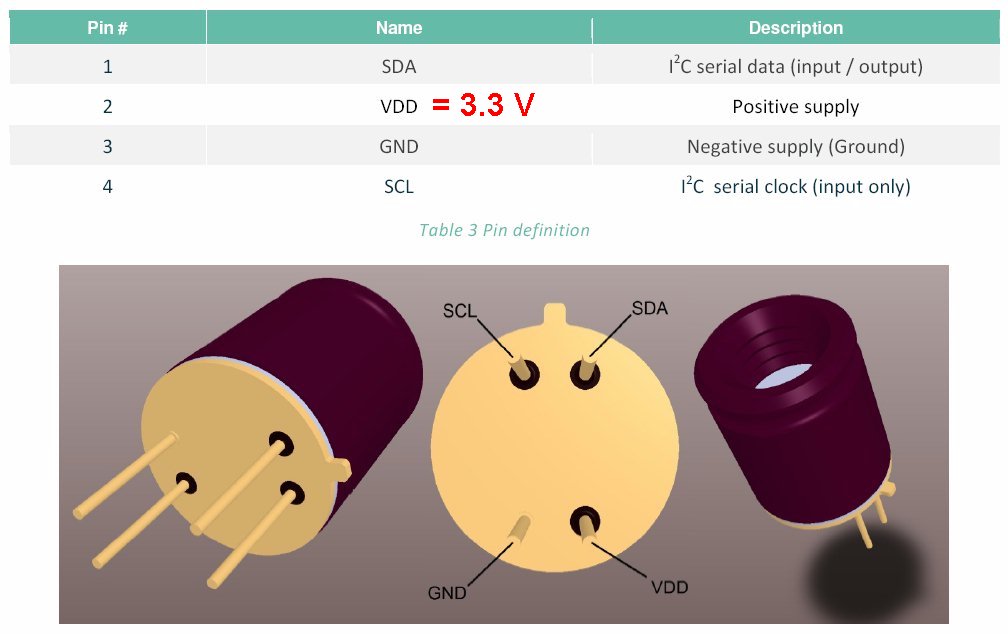
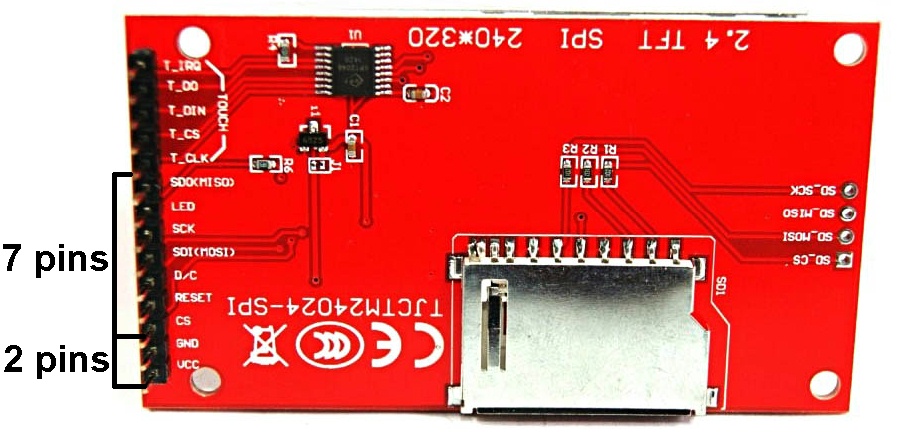
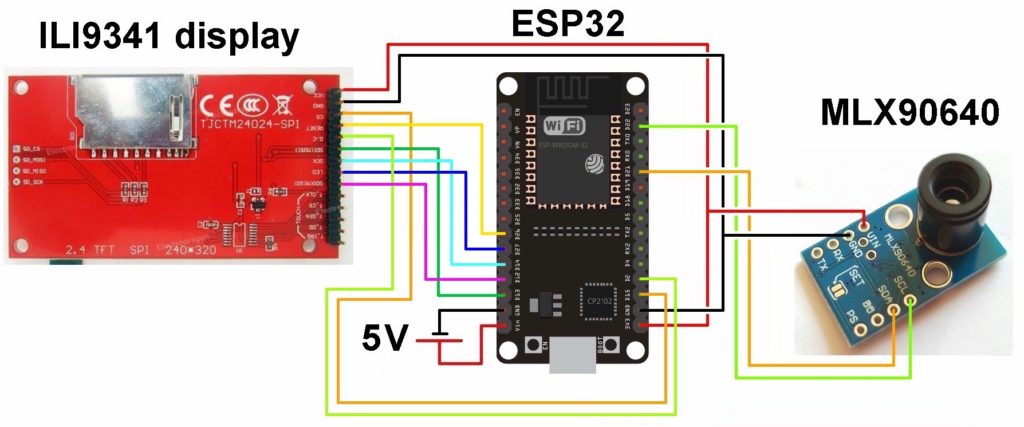
Variante 2: Sensor MLX90640
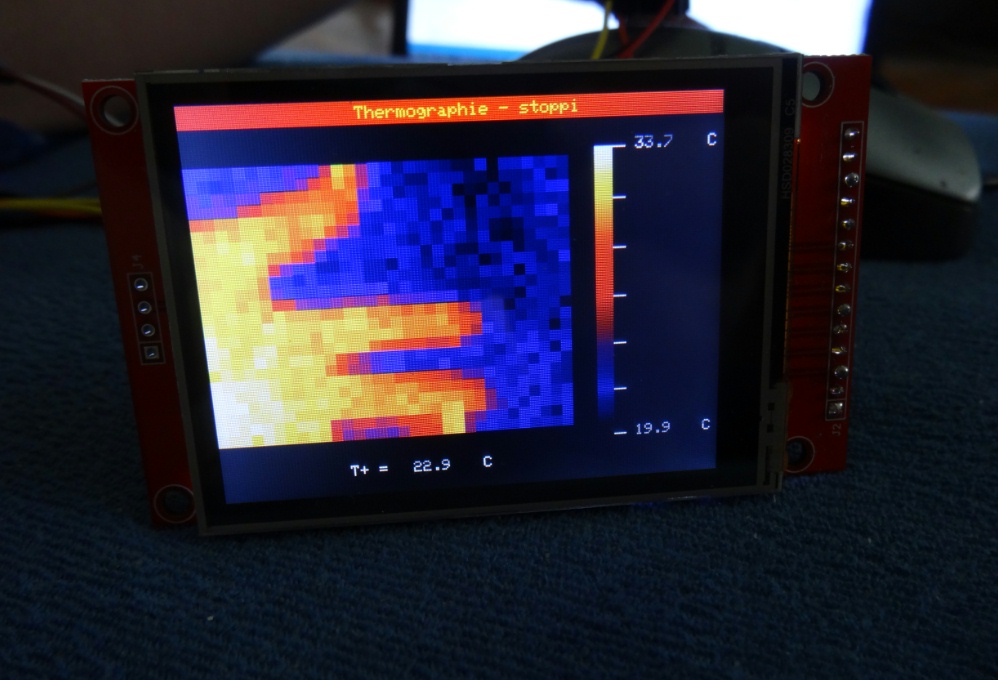
Dieser Sensor verfügt wie schon erwähnt bereits über 32×24 Pixel. Deshalb können ca. 2 Bilder pro Sekunde erstellt/angezeigt werden. Das Display verfügt über 320×240 Pixel. Angezeigt werden Minimaltemperatur, Maximaltemperatur und Temperatur des mit einem Kreuz versehenen Pixels in der Bildmitte.










Arduino-Code:
#include <Wire.h>
#include "MLX90640_API.h"
#include "MLX90640_I2C_Driver.h"
#include "SPI.h"
#include "Adafruit_GFX.h"
#include "Adafruit_ILI9341.h"
// For the ESP-WROVER_KIT, these are the default.
#define TFT_CS 15
#define TFT_DC 2
#define TFT_MOSI 13
#define TFT_CLK 14
#define TFT_RST 26
#define TFT_MISO 12
#define TFT_LED 27
Adafruit_ILI9341 tft = Adafruit_ILI9341(TFT_CS, TFT_DC, TFT_MOSI, TFT_CLK, TFT_RST, TFT_MISO);
const byte MLX90640_address = 0x33; //Default 7-bit unshifted address of the MLX90640
#define TA_SHIFT 8 //Default shift for MLX90640 in open air
static float mlx90640To[768];
paramsMLX90640 mlx90640;
int xPos, yPos; // Abtastposition
int R_colour, G_colour, B_colour; // RGB-Farbwert
int i, j; // Zählvariable
float T_max, T_min; // maximale bzw. minimale gemessene Temperatur
float T_center; // Temperatur in der Bildschirmmitte
// ***************************************
// **************** SETUP ****************
// ***************************************
void setup()
{
Serial.begin(115200);
Wire.begin();
Wire.setClock(400000); //Increase I2C clock speed to 400kHz
while (!Serial); //Wait for user to open terminal
Serial.println("MLX90640 IR Array Example");
if (isConnected() == false)
{
Serial.println("MLX90640 not detected at default I2C address. Please check wiring. Freezing.");
while (1);
}
Serial.println("MLX90640 online!");
//Get device parameters - We only have to do this once
int status;
uint16_t eeMLX90640[832];
status = MLX90640_DumpEE(MLX90640_address, eeMLX90640);
if (status != 0)
Serial.println("Failed to load system parameters");
status = MLX90640_ExtractParameters(eeMLX90640, &mlx90640);
if (status != 0)
{
Serial.println("Parameter extraction failed");
Serial.print(" status = ");
Serial.println(status);
}
//Once params are extracted, we can release eeMLX90640 array
MLX90640_I2CWrite(0x33, 0x800D, 6401); // writes the value 1901 (HEX) = 6401 (DEC) in the register at position 0x800D to enable reading out the temperatures!!!
// ===============================================================================================================================================================
//MLX90640_SetRefreshRate(MLX90640_address, 0x00); //Set rate to 0.25Hz effective - Works
//MLX90640_SetRefreshRate(MLX90640_address, 0x01); //Set rate to 0.5Hz effective - Works
//MLX90640_SetRefreshRate(MLX90640_address, 0x02); //Set rate to 1Hz effective - Works
//MLX90640_SetRefreshRate(MLX90640_address, 0x03); //Set rate to 2Hz effective - Works
MLX90640_SetRefreshRate(MLX90640_address, 0x04); //Set rate to 4Hz effective - Works
//MLX90640_SetRefreshRate(MLX90640_address, 0x05); //Set rate to 8Hz effective - Works at 800kHz
//MLX90640_SetRefreshRate(MLX90640_address, 0x06); //Set rate to 16Hz effective - Works at 800kHz
//MLX90640_SetRefreshRate(MLX90640_address, 0x07); //Set rate to 32Hz effective - fails
pinMode(TFT_LED, OUTPUT);
digitalWrite(TFT_LED, HIGH);
tft.begin();
tft.setRotation(1);
tft.fillScreen(ILI9341_BLACK);
tft.fillRect(0, 0, 319, 13, tft.color565(255, 0, 10));
tft.setCursor(100, 3);
tft.setTextSize(1);
tft.setTextColor(ILI9341_YELLOW, tft.color565(255, 0, 10));
tft.print("Thermographie - stoppi");
tft.drawLine(250, 210 - 0, 258, 210 - 0, tft.color565(255, 255, 255));
tft.drawLine(250, 210 - 30, 258, 210 - 30, tft.color565(255, 255, 255));
tft.drawLine(250, 210 - 60, 258, 210 - 60, tft.color565(255, 255, 255));
tft.drawLine(250, 210 - 90, 258, 210 - 90, tft.color565(255, 255, 255));
tft.drawLine(250, 210 - 120, 258, 210 - 120, tft.color565(255, 255, 255));
tft.drawLine(250, 210 - 150, 258, 210 - 150, tft.color565(255, 255, 255));
tft.drawLine(250, 210 - 180, 258, 210 - 180, tft.color565(255, 255, 255));
tft.setCursor(80, 220);
tft.setTextColor(ILI9341_WHITE, tft.color565(0, 0, 0));
tft.print("T+ = ");
// drawing the colour-scale
// ========================
for (i = 0; i < 181; i++)
{
getColour(i);
tft.drawLine(240, 210 - i, 250, 210 - i, tft.color565(R_colour, G_colour, B_colour));
}
}
// **********************************
// ************** LOOP **************
// **********************************
void loop()
{
for (byte x = 0 ; x < 2 ; x++) //Read both subpages
{
uint16_t mlx90640Frame[834];
int status = MLX90640_GetFrameData(MLX90640_address, mlx90640Frame);
if (status < 0)
{
Serial.print("GetFrame Error: ");
Serial.println(status);
}
float vdd = MLX90640_GetVdd(mlx90640Frame, &mlx90640);
float Ta = MLX90640_GetTa(mlx90640Frame, &mlx90640);
float tr = Ta - TA_SHIFT; //Reflected temperature based on the sensor ambient temperature
float emissivity = 0.95;
MLX90640_CalculateTo(mlx90640Frame, &mlx90640, emissivity, tr, mlx90640To);
}
// determine T_min and T_max and eliminate error pixels
// ====================================================
mlx90640To[1*32 + 21] = 0.5 * (mlx90640To[1*32 + 20] + mlx90640To[1*32 + 22]); // eliminate the error-pixels
mlx90640To[4*32 + 30] = 0.5 * (mlx90640To[4*32 + 29] + mlx90640To[4*32 + 31]); // eliminate the error-pixels
T_min = mlx90640To[0];
T_max = mlx90640To[0];
for (i = 1; i < 768; i++)
{
if((mlx90640To[i] > -41) && (mlx90640To[i] < 301))
{
if(mlx90640To[i] < T_min)
{
T_min = mlx90640To[i];
}
if(mlx90640To[i] > T_max)
{
T_max = mlx90640To[i];
}
}
else if(i > 0) // temperature out of range
{
mlx90640To[i] = mlx90640To[i-1];
}
else
{
mlx90640To[i] = mlx90640To[i+1];
}
}
// determine T_center
// ==================
T_center = mlx90640To[11* 32 + 15];
// drawing the picture
// ===================
for (i = 0 ; i < 24 ; i++)
{
for (j = 0; j < 32; j++)
{
mlx90640To[i*32 + j] = 180.0 * (mlx90640To[i*32 + j] - T_min) / (T_max - T_min);
getColour(mlx90640To[i*32 + j]);
tft.fillRect(217 - j * 7, 35 + i * 7, 7, 7, tft.color565(R_colour, G_colour, B_colour));
}
}
tft.drawLine(217 - 15*7 + 3.5 - 5, 11*7 + 35 + 3.5, 217 - 15*7 + 3.5 + 5, 11*7 + 35 + 3.5, tft.color565(255, 255, 255));
tft.drawLine(217 - 15*7 + 3.5, 11*7 + 35 + 3.5 - 5, 217 - 15*7 + 3.5, 11*7 + 35 + 3.5 + 5, tft.color565(255, 255, 255));
tft.fillRect(260, 25, 37, 10, tft.color565(0, 0, 0));
tft.fillRect(260, 205, 37, 10, tft.color565(0, 0, 0));
tft.fillRect(115, 220, 37, 10, tft.color565(0, 0, 0));
tft.setTextColor(ILI9341_WHITE, tft.color565(0, 0, 0));
tft.setCursor(265, 25);
tft.print(T_max, 1);
tft.setCursor(265, 205);
tft.print(T_min, 1);
tft.setCursor(120, 220);
tft.print(T_center, 1);
tft.setCursor(300, 25);
tft.print("C");
tft.setCursor(300, 205);
tft.print("C");
tft.setCursor(155, 220);
tft.print("C");
//delay(20);
}
// ===============================
// ===== determine the colour ====
// ===============================
void getColour(int j)
{
if (j >= 0 && j < 30)
{
R_colour = 0;
G_colour = 0;
B_colour = 20 + (120.0/30.0) * j;
}
if (j >= 30 && j < 60)
{
R_colour = (120.0 / 30) * (j - 30.0);
G_colour = 0;
B_colour = 140 - (60.0/30.0) * (j - 30.0);
}
if (j >= 60 && j < 90)
{
R_colour = 120 + (135.0/30.0) * (j - 60.0);
G_colour = 0;
B_colour = 80 - (70.0/30.0) * (j - 60.0);
}
if (j >= 90 && j < 120)
{
R_colour = 255;
G_colour = 0 + (60.0/30.0) * (j - 90.0);
B_colour = 10 - (10.0/30.0) * (j - 90.0);
}
if (j >= 120 && j < 150)
{
R_colour = 255;
G_colour = 60 + (175.0/30.0) * (j - 120.0);
B_colour = 0;
}
if (j >= 150 && j <= 180)
{
R_colour = 255;
G_colour = 235 + (20.0/30.0) * (j - 150.0);
B_colour = 0 + 255.0/30.0 * (j - 150.0);
}
}
//Returns true if the MLX90640 is detected on the I2C bus
boolean isConnected()
{
Wire.beginTransmission((uint8_t)MLX90640_address);
if (Wire.endTransmission() != 0)
return (false); //Sensor did not ACK
return (true);
}
