
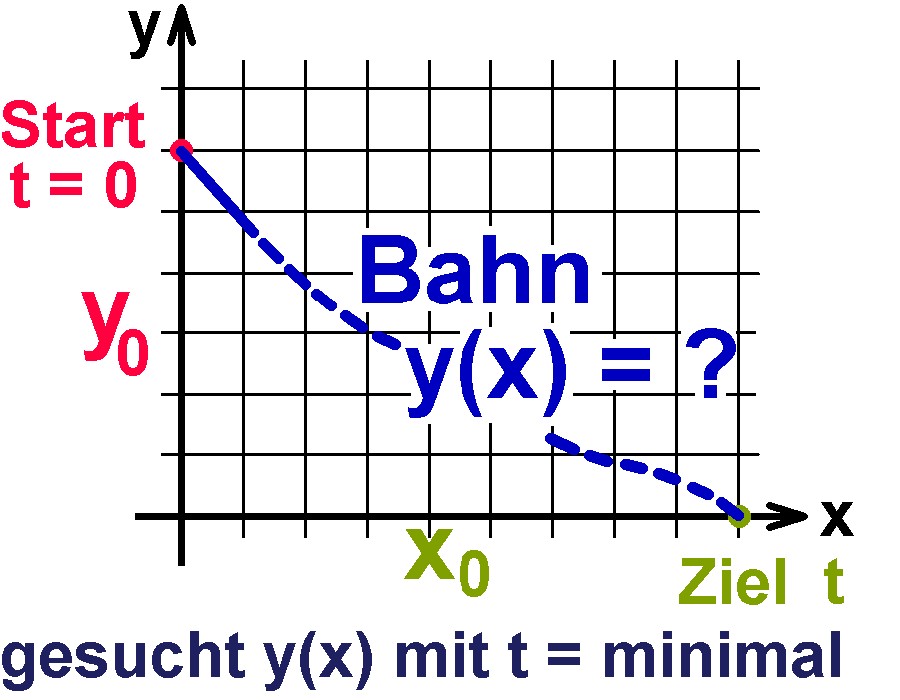
Bei diesem Versuch geht es darum zuerst experimentell und dann mittels Computer die schnellste Kugelbahn bei gegebenen Start (0/0.2 m) und Ziel (0.8 m/0) zu ermitteln. Die Schüler merken schnell, dass die Verbindungsgerade zwischen Start und Ziel nicht die schnellste Verbindung ist.
Die Kugelbahn selbst ist aus einem flexiblen Kabelkanal vom Baumarkt gefertigt. Die Neigung der Bahn im Start- und Zielpunkt kann stufenlos verstellt werden. Damit eine solche Verstellung keinen Einfluss auf die exakte Start- und Zielposition hat, befindet sich diese genau in der Drehachse der Verstellung. Da sich bei Veränderung der Neigung natürlich auch die Bahnlänge verändert, muss die Kugelbahn natürlich in der Halterung verschoben werden können. Trotz einer gewissen Eingeschränktheit lassen sich mit dieser Methode sehr viele unterschiedliche Bahnformen festlegen.
Die Laufzeit der Kugel wird einfach mit einer Stoppuhr mehrfach bei unveränderter Bahn bestimmt und daraus der Mittelwert berechnet. Konkret liegen die besten Laufzeiten bei ca. 0.6 Sekunden.



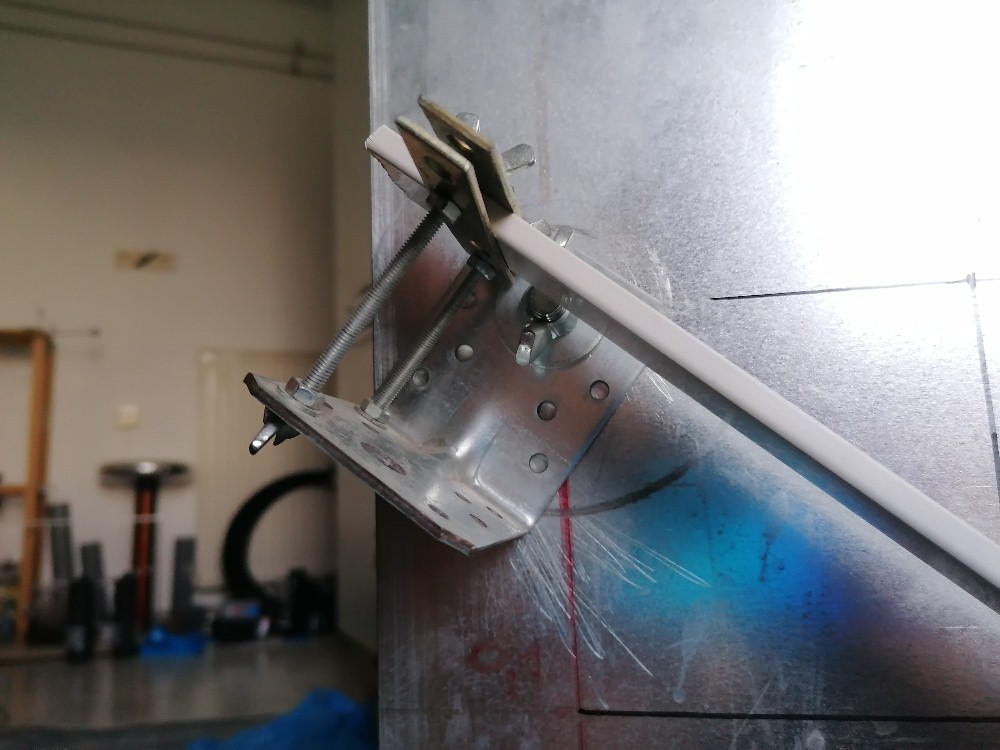
Hier erkennt man sehr gut, wie die Drehachse der Verstellung genau durch die Plastikleiste verläuft. Eine Änderung der Bahnneigung hat dann keinen Einfluss auf die Start- und Zielposition.


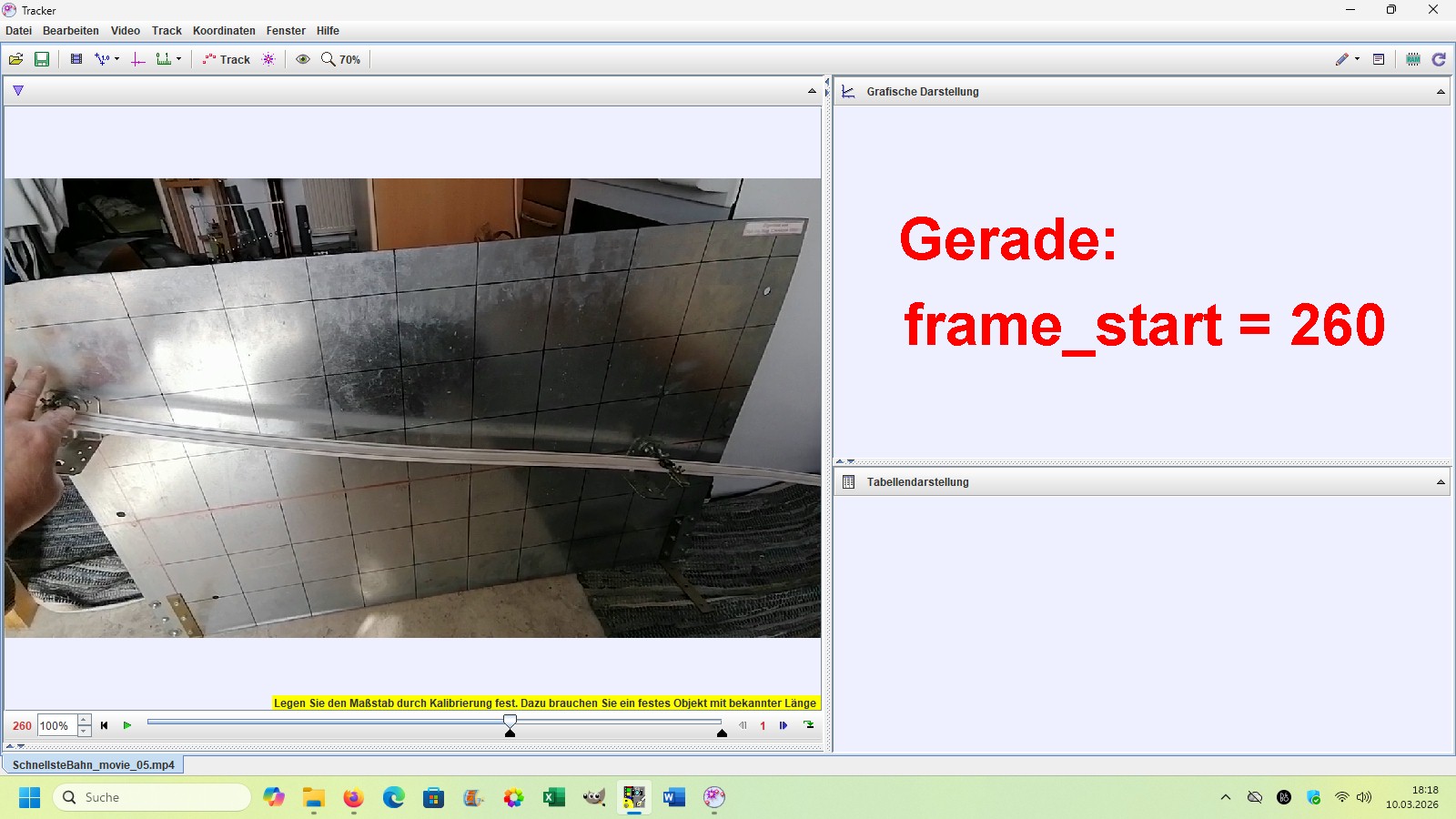
Gerade Bahn: Kürzeste Strecke

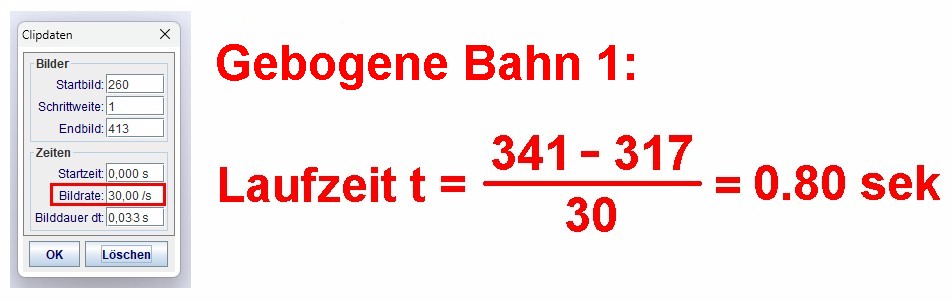
Mit der hochgeschätzten Software Tracker bestimme ich den Start- und End-Frame. Mittels der Bildrate (konkret 30 fps) kann dann die Rollzeit berechnet werden:

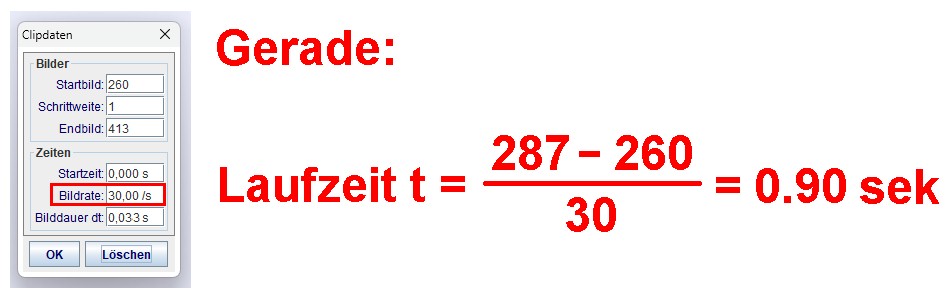
Für die gerade Bahn (schiefe Ebene) können die Schüler auch selbst noch die Laufzeit der Kugel berechnen. Hier das Ergebnis:
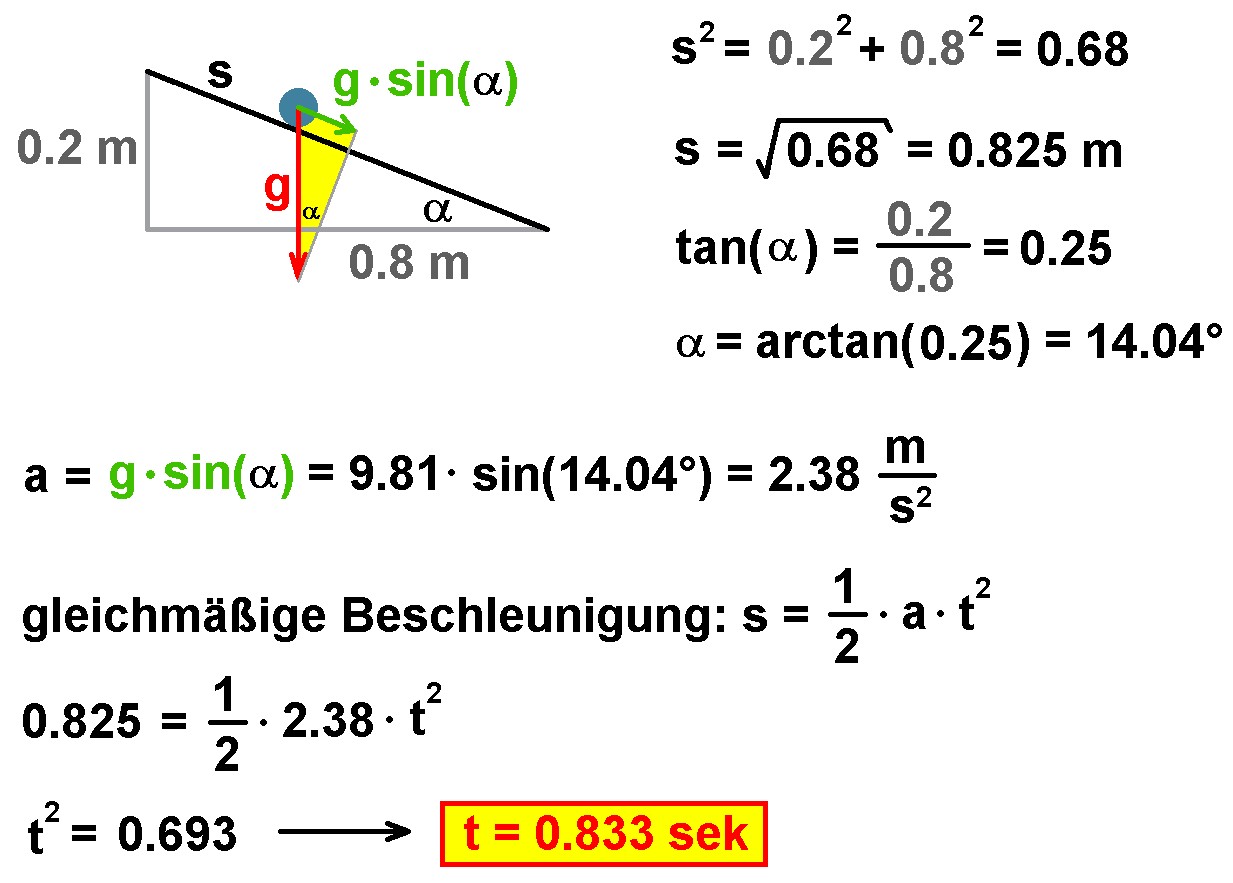
Die Übereinstimmung zwischen Theorie und Experiment ist ziemlich gut. Man muss aber bedenken, dass bei der theoretischen Herleitung die Rotation der Kugel unberücksichtigt blieb. In dieser steckt natürlich auch Energie (Rotationsenergie E = 1/2 · I · ω²), sodass für die Translationsbewegung (kinetische Energie E = 1/2 · m · v²) weniger zur Verfügung steht und die Kugel länger als die berechneten 0.833 Sekunden benötigt. Genaueres dazu folgt noch weiter unten…
Gekrümmte Bahn:

Brachistochrone (griechisch brachistos kürzeste, chronos Zeit): Schnellste Bahn
Wie man in der folgenden Abbildung gut erkennen kann, verläuft die schnellste Bahn sogar weit unter der Zielhöhe (y = 0). Dadurch nimmt zwar der Weg zu, aber die Durchschnittsgeschwindigkeit steigt noch stärker an.

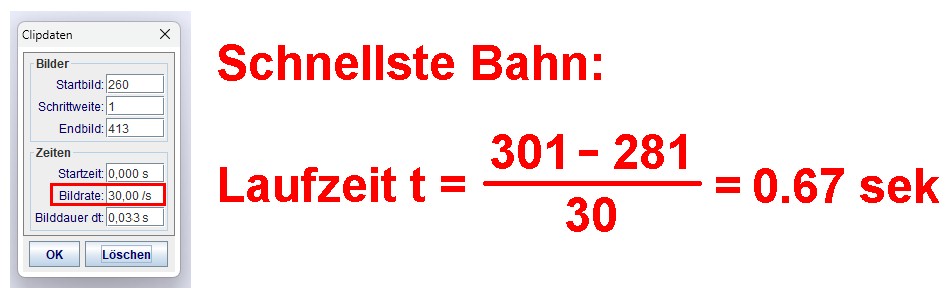
Die experimentell ermittelte kürzeste Laufzeit beträgt also 0.67 Sekunden…
Im zweiten Teil lässt man nun den Computer die schnellste Bahn berechnen. Hierzu habe ich vor 20 Jahren ein Programm in Visual Basic geschrieben. Zuerst aber noch zur Theorie des Experiments:

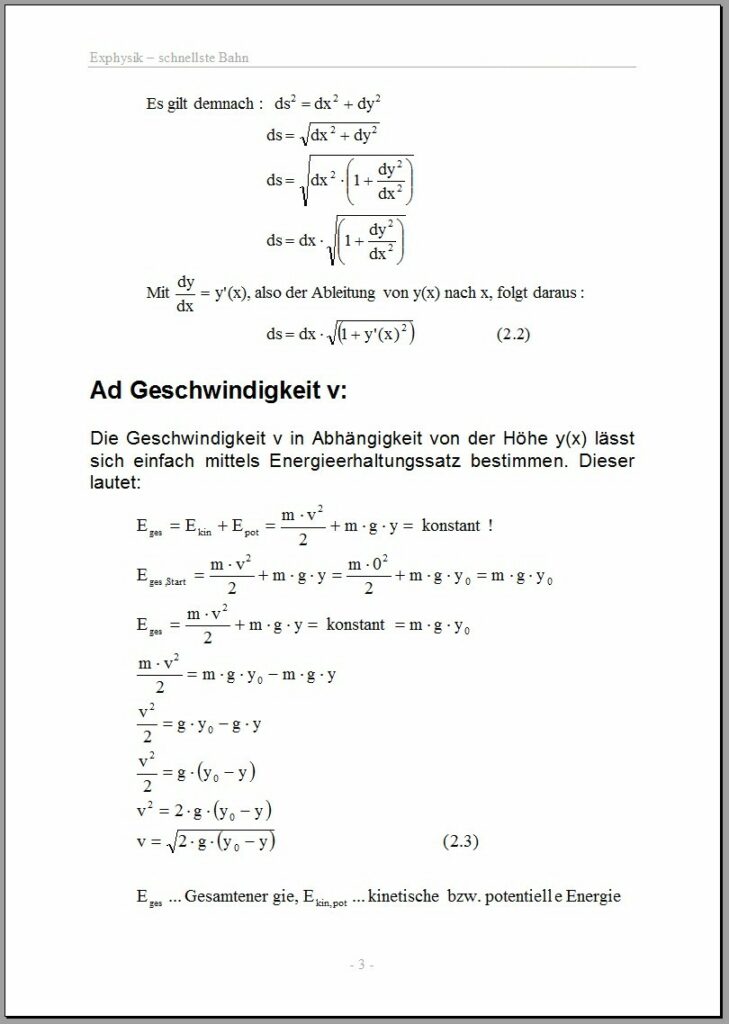

Es sei darauf hingewiesen, dass bei der Herleitung der Laufzeit die Reibung der Kugel vernachlässigt wurde. Die Integrale werden numerisch mittels Trapezsummenverfahren berechnet. Dabei verwende ich 10000 Stützstellen auf der x-Achse, was eine hinreichende Genauigkeit liefert.
Wie man anhand der Schlussformel (2.5) sieht, benötigt man zur Berechnung der Laufzeit nur die Bahnfunktion y(x). Aber wie weiß nun der Computer, welche Funktion er nehmen soll? Es gibt ja unendlich viele verschiedene Funktionen…
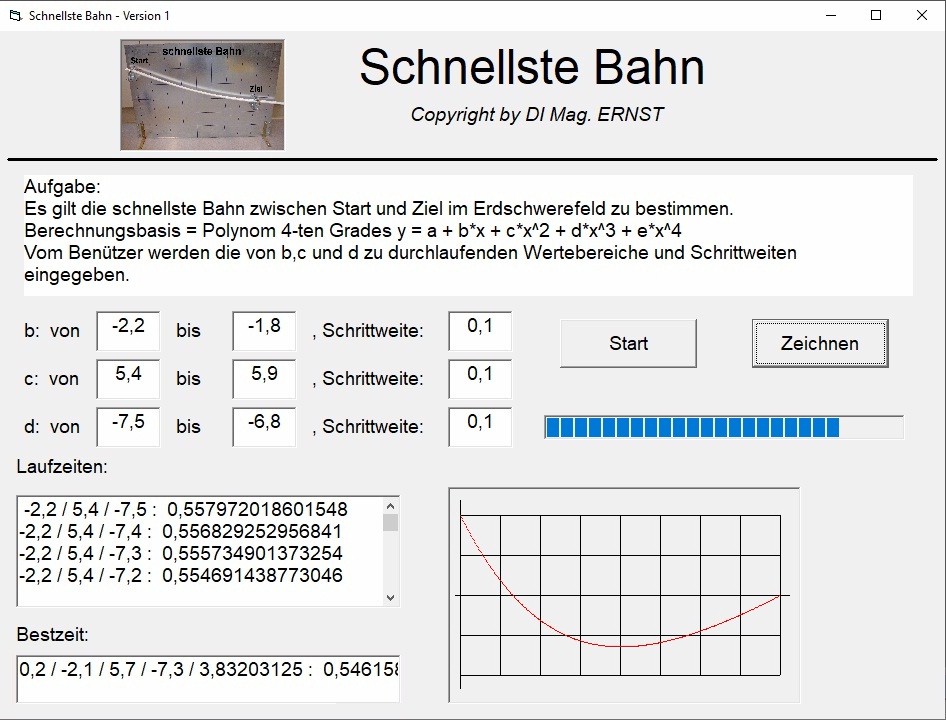
Nun bei meinen Berechnungen schränke ich die zu untersuchenden Bahnfunktionen y(x) auf reine Polynome vom Grad n <= 4 ein. Dies ist aber für den Computer noch immer nicht einschränkend genug. Deshalb müssen die Schüler die Grenzen der zu verwendenden Koeffizienten der Polynomfunktion und deren Schrittweite eingeben. Hier sieht man die Bedienoberfläche des Programms:

Links oben werden die Grenzen und Schrittweiten für die Koeffizienten b, c und d eingegeben. Der Koeffizient a ist bei einem Polynom der Funktion y(x) = a + b·x + c·x² + d·x³ + e·x^ 4 aber durch den Startpunkt (0/0.2m) mit 0.2 festgelegt. Ebenso der Koeffizient e, da ja die Bahn zwingend durch den Endpunkt (0.8 m/0) gehen muss. Bleiben also nur noch die Koeffizienten b, c und d zur freien Auswahl.
Drückt man auf Start, so geht der Computer alle möglichen Kombinationen der Koeffizienten b, c und d durch und berechnet jeweils die Rollzeit t. Die beste/schnellste Laufzeit gibt er dann gesondert im Fenster unten links aus. Dieses (vorläufige) Ergebnis kann dazu genutzt werden, die Bereiche der Koeffizienten weiter einzuschränken, dafür mit feinerer Schrittweite.
Die beste/schnellste Bahn wird dann vom Programm auch noch rechts unten grafisch dargestellt:
Die Dauer der Berechnungen ist nicht gerade kurz. Bei 1000 Stützstellen für das Integral und 7 · 21 · 21 = 3087 verschiedenen Koeffizienten-Kombinationen braucht der Computer bereits über 2 Minuten Rechenzeit:

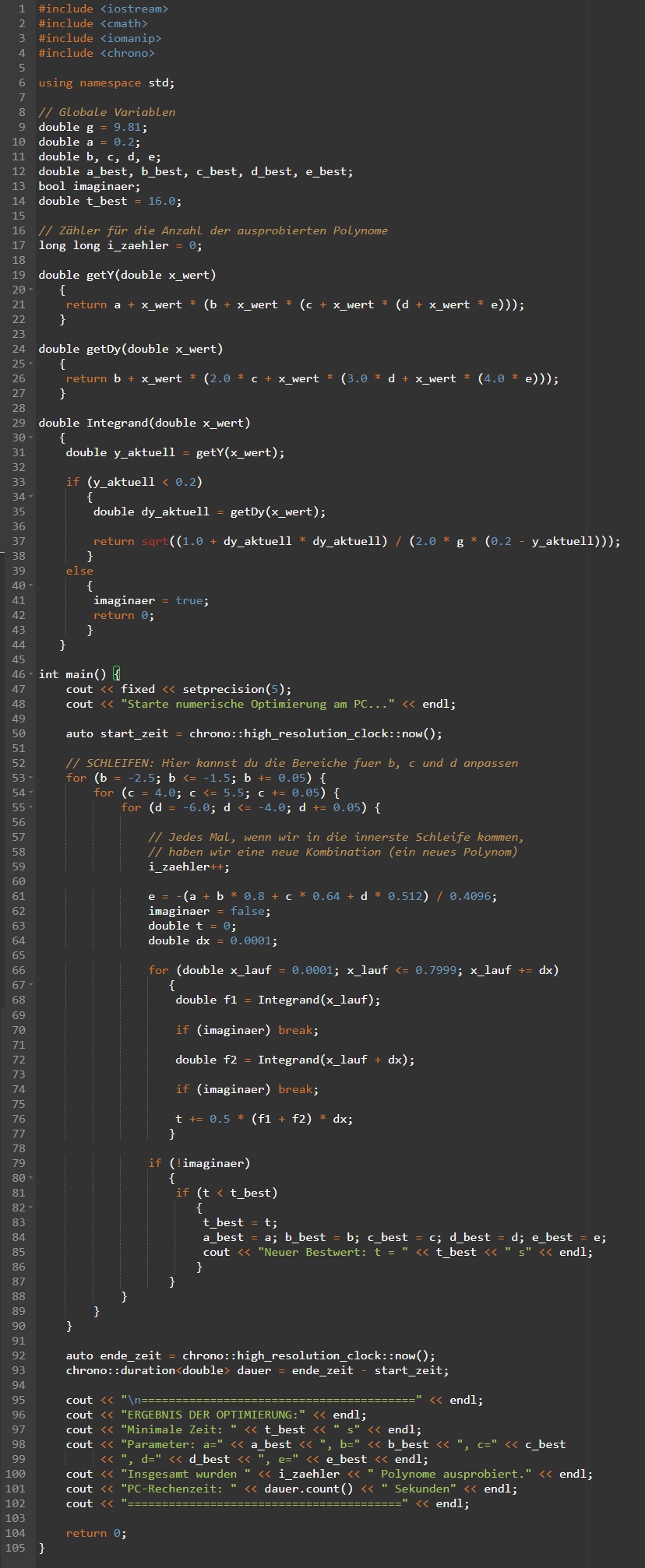
Wähle ich die Koeffizientenbereiche zu groß und/oder die Schrittweiten zu klein, scheint der Rechner abzustürzen bzw. gibt ewig keine Ergebnisse mehr aus. Daher habe ich das Visual Basic Programm in C++ umgeschrieben. Hier das Ergebnis:
Zum Ausführen des Programms benötigt man entweder auf seinem PC einen C++-Compiler, oder aber man nutzt so wie ich einen online-C++-Compiler.
Link: https://www.onlinegdb.com/online_c_compiler

Für 397536 verschiedene Polynome 4-ten Grades benötigte der online-Compiler immerhin 370 Sekunden. Dann spuckte er folgendes Ergebnis aus:
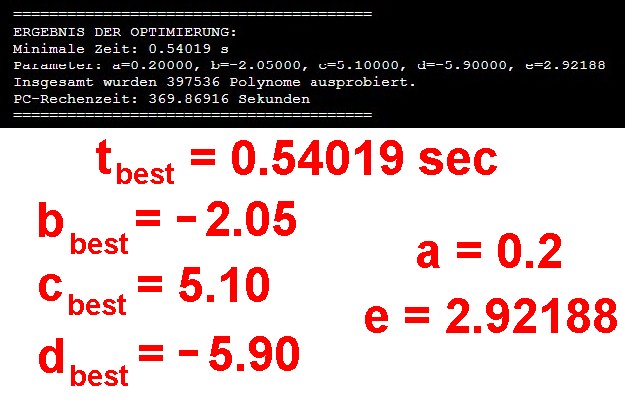
Die Bestzeit beträgt also 0.54019 Sekunden. Mit den besten Koeffizienten a = 0.2, b = –2.05, c = 5.1, d = – 5.9 und e = 2.92188 kann man dann zum Beispiel in EXCEL die schnellste Bahn zeichnen:
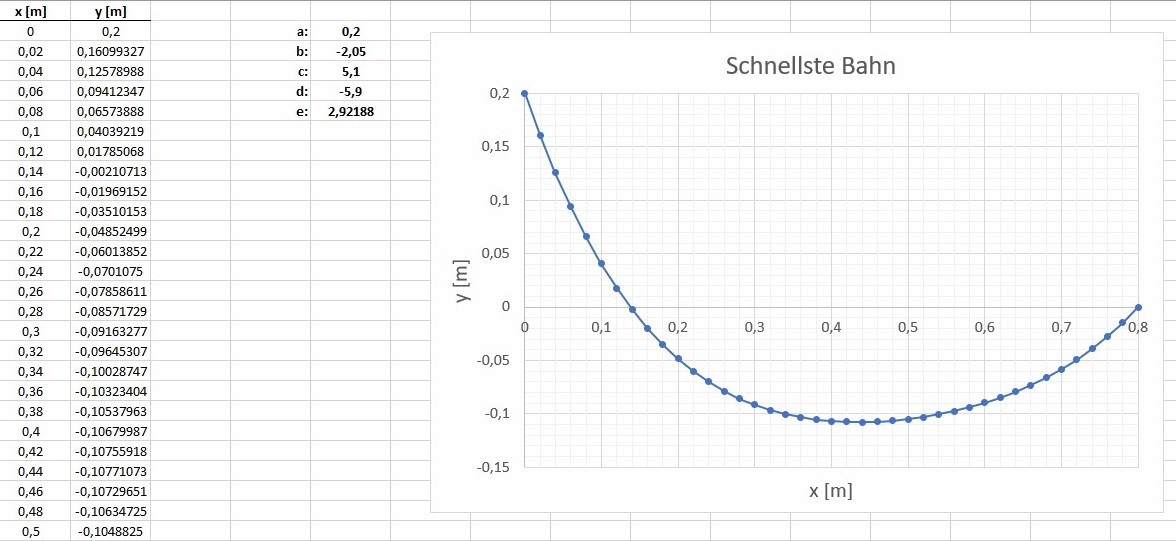
Diese theoretisch erhaltene „schnellste Bahn“ kann zum Abschluss mit der experimentell ermittelten verglichen werden. Dazu übertragen die Schüler den Verlauf der schnellsten Kunststoffbahn in denselben Graphen wie the Theoriekurve:

Die Übereinstimmung ist exzellent, Heureka 😉
Man kann sich dann auch noch ein wenig spielen und die Software dahingehend abändern, dass nur noch Polynome 1-ten (= Gerade), 2-ten (= Parabeln) und 3-ten Grades untersucht werden. Ermittelt man für diese Polynome niedrigeren Grades die jeweils schnellste Bahn erhält man folgendes Ergebnis:

Für ein Polynom 1-ten Grades, was ja einer Geraden entspricht, gibt es sowieso nur eine einzige Lösung und zwar: y(x) = –(0.2/0.8)·x + 0.2. Durch Erhöhung des Polynomgrads erhält man immer bessere Ergebnisse. Das Polynom 4-ten Grades stimmt dann fast schon perfekt mit der tatsächlichen Brachistochrone überein…
Experimentell erhielten wir für die schnellste Bahn eine Laufzeit von 0.67 Sekunden. Das Computerprogramm berechnete die schnellste Laufzeit zu 0.54019 Sekunden. Woher kommt diese Abweichung?
Nun, bei der Simulation wurde keine Reibung und auch keine Rotationsenergie der Kugel berücksichtigt. Im Experiment steckt aber in der rollenden Kugel neben der Translationsenergie E = 1/2 · m · v² auch noch Rotationsenergie E = 1/2 · I · ω². Die abnehmende potentielle Energie m · g · h speist aber beide, sodass für die reine Translation weniger Energie zur Verfügung steht. Mit berücksichtigter Rotation ist die Kugel also langsamer und erreicht später das Ziel. Man kann diesen Verspätungsfaktor auch relativ einfach wiefolgt berechnen:
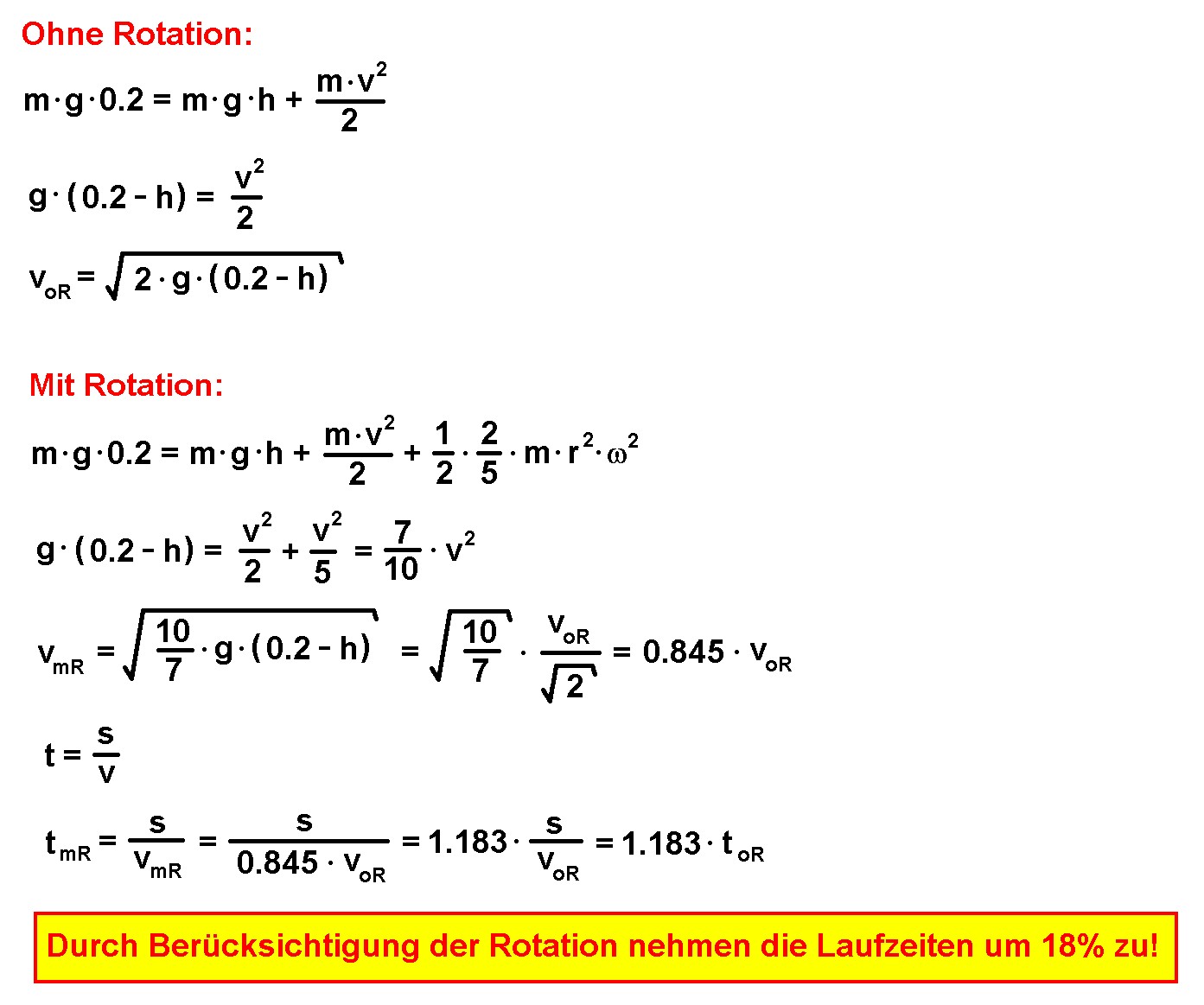
Die 0.54019 Sekunden der Simulation OHNE Rotationsenergie müssen also mit dem Faktor 1.183 multipliziert werden, um auf die reale Laufzeit MIT Rotation zu kommen. Man erhält also in der Theorie folgende schnellste Laufzeit: t = 1.183 · 0.54019 = 0.639 sek. Dieser Wert stimmt nun schon deutlich besser mit dem experimentellen Ergebnis 0.67 sek überein, Heureka zum zweiten Mal…
