
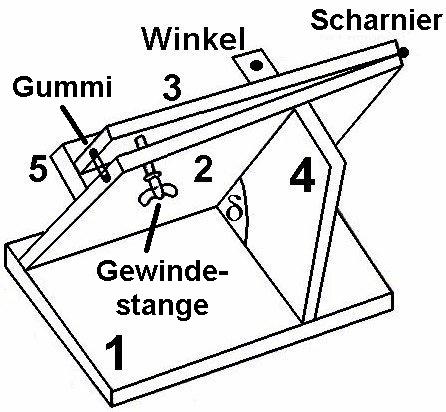
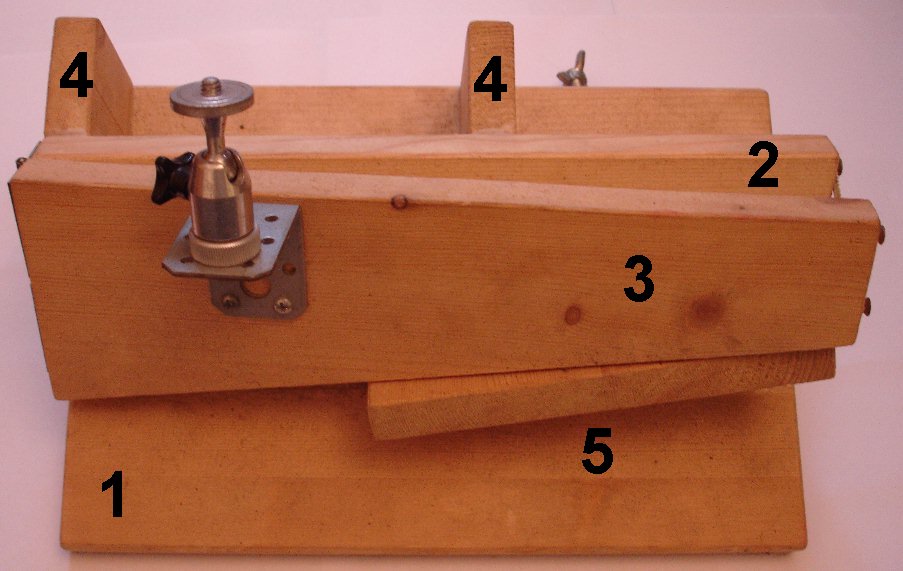
Mit dieser einfachen Holzklappenmontierung habe ich früher Aufnahmen mit Normalobjektiv und Belichtungszeiten um die 5 min gemacht.
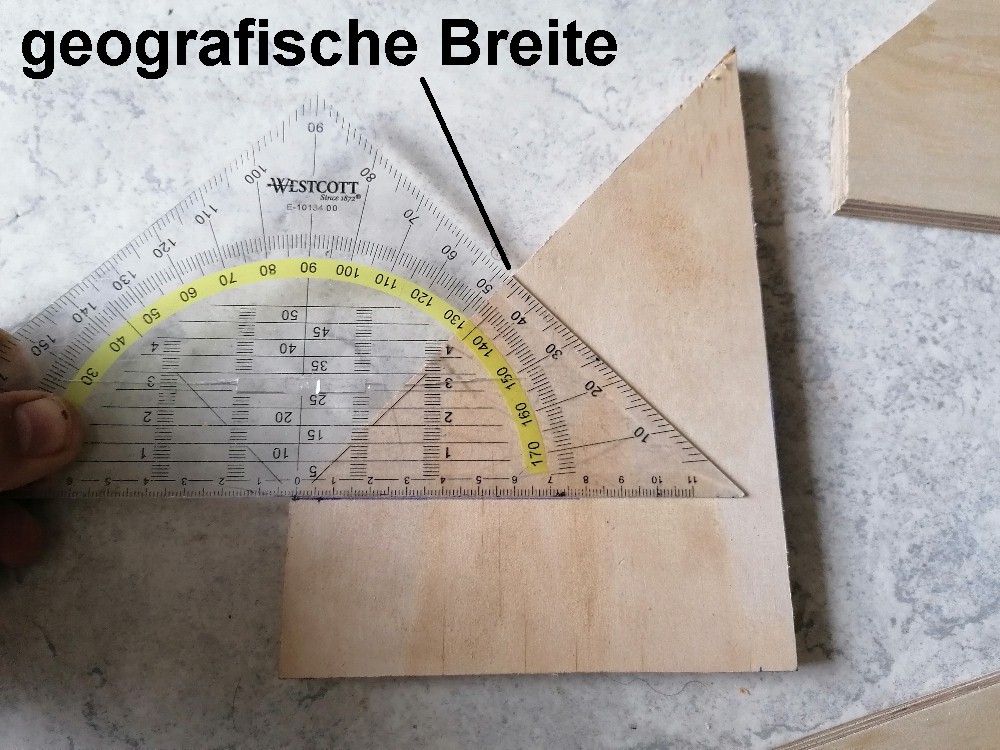
Der Winkel δ entspricht genau der geographischen Breite des Beobachtungsorts, bei mir also rund 47°. Die Gewindestange dreht man entweder manuell oder mittels Schrittmotor. Um die manuelle Nachführung möglichst einfach zu gestalten, wählt man 1 Umdrehung der Gewindestange pro Minute.
Ein Sterntag beträgt ja ca. 23 h 56 min. Innerhalb einer Minute legen die Sterne daher einen Winkel von 360 / (23 · 60 + 56) = 0.2507 ° zurück. Besitzt die Gewindestange ein Gewinde mit 1 mm Steigung, so muss der Abstand d der Gewindestange von der Scharnierachse genau 228.5 mm betragen.





Ergebnisse:
Das Sternbild Schütze ohne Nachführung; Belichtungszeit ca. 25 Sekunden:

Das Sternbild Schütze mit der Holzklappenmontierung aufgenommen; Belichtungszeit ca. 3 min:

Das Sternbild Schwan mit der Holzklappenmontierung aufgenommen; Belichtungszeit ca. 3 min. Links neben Deneb ist ansatzweise der Nordamerikanebel (NGC 7000) zu erkennen:

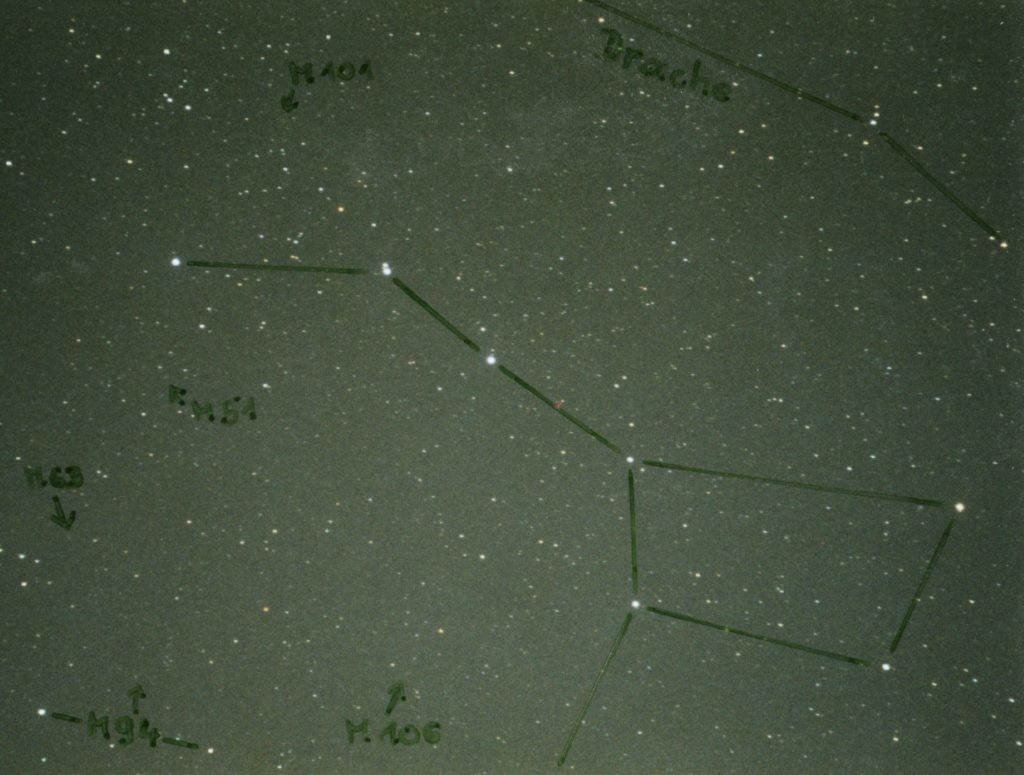
Das Sternbild großer Wagen mit der Holzklappenmontierung aufgenommen; Belichtungszeit ca. 3 min:
Der Nachteil der oben beschriebenen Holzklappenmontierung bestand im manuellen Verstellen der Gewindestange. Daher möchte ich noch eine weitere motorisierte Version mit Schrittmotor umsetzen. Die Ansteuerung des Schrittmotors erfolgt mit einem Arduino Nano.
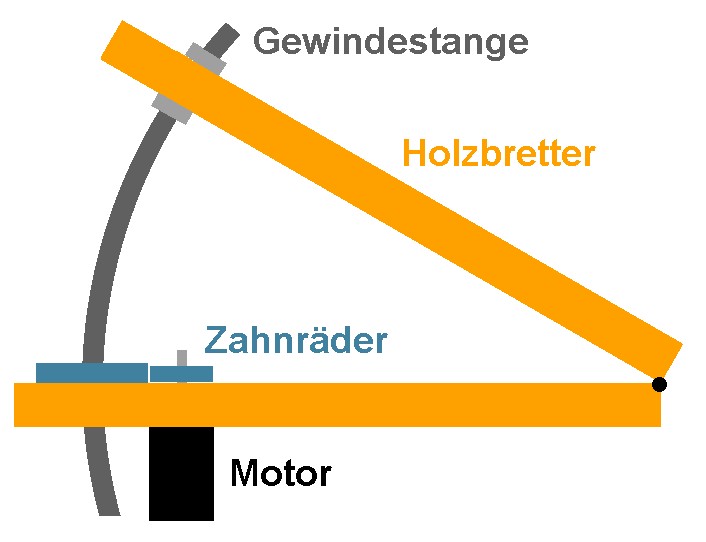
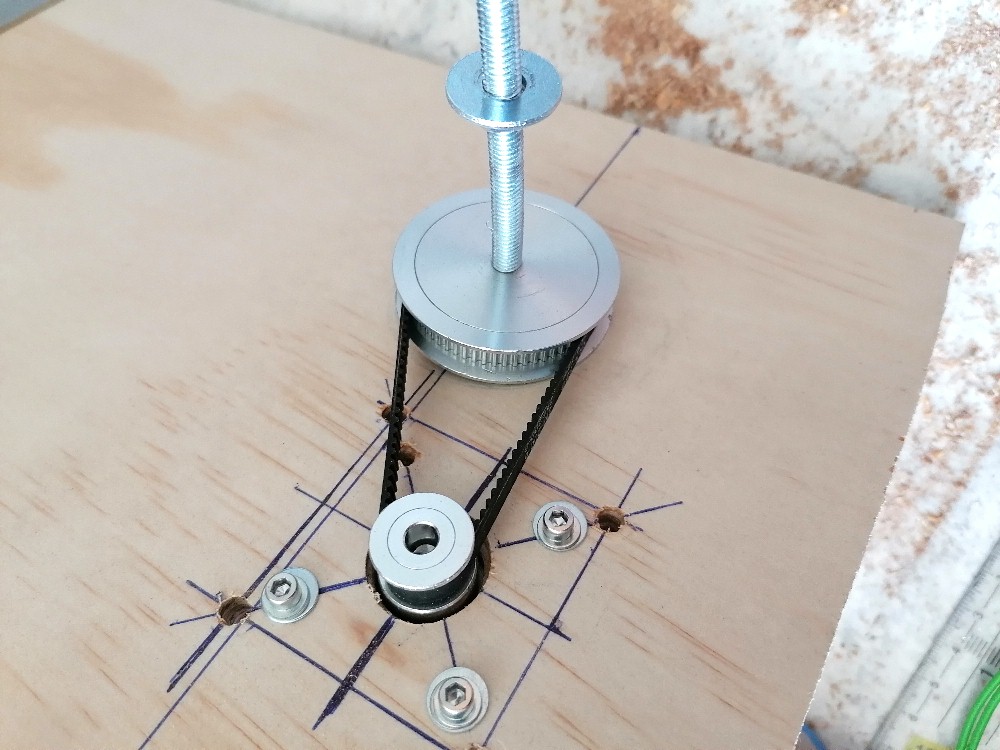
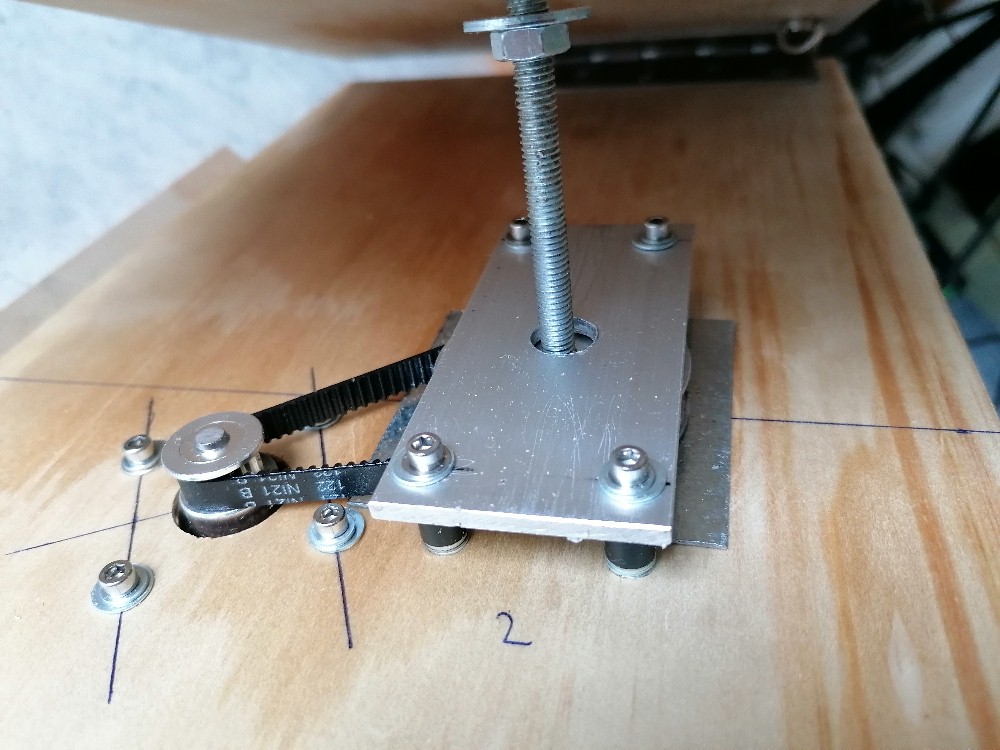
Die Gewindestange wird mit einem Synchronrad mit 20/60 Zähnen angetrieben:

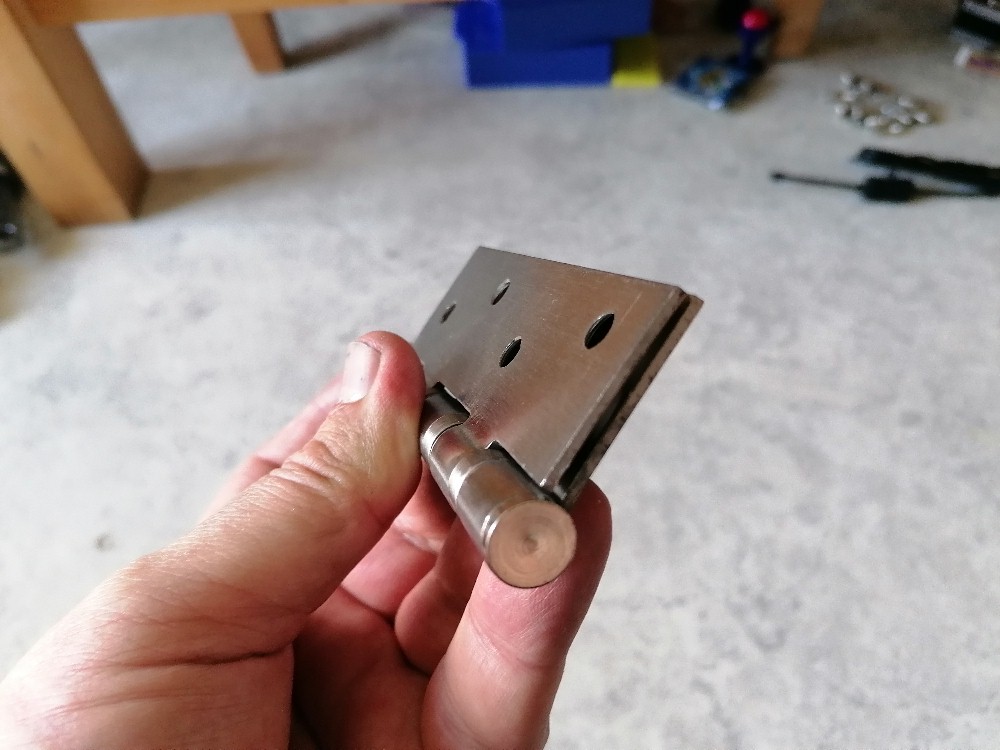
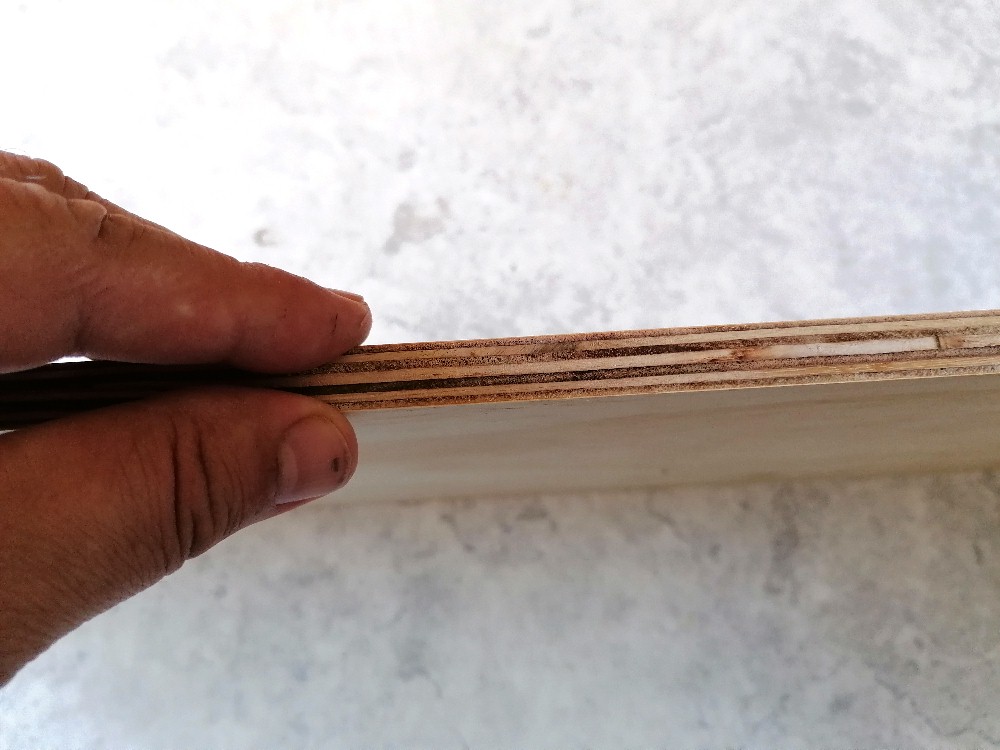
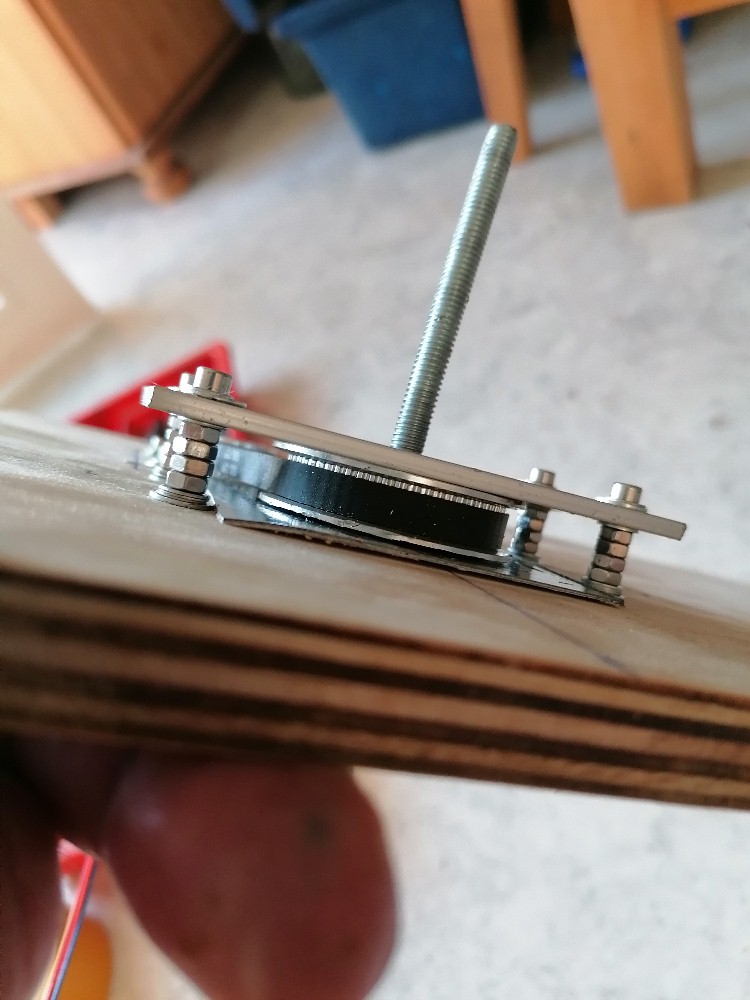
Daher muss sich der Schrittmotor exakt 3 mal pro Minute drehen. Damit die Holzplatte kein Spiel hat, kaufte ich mir folgendes kugelgelagertes Scharnier auf Amazon:


Den Schrittmotor gibt es günstig bei http://www.pollin.de:




Als Schrittmotortreiber kommt das günstige Modul a4988 zum Einsatz:
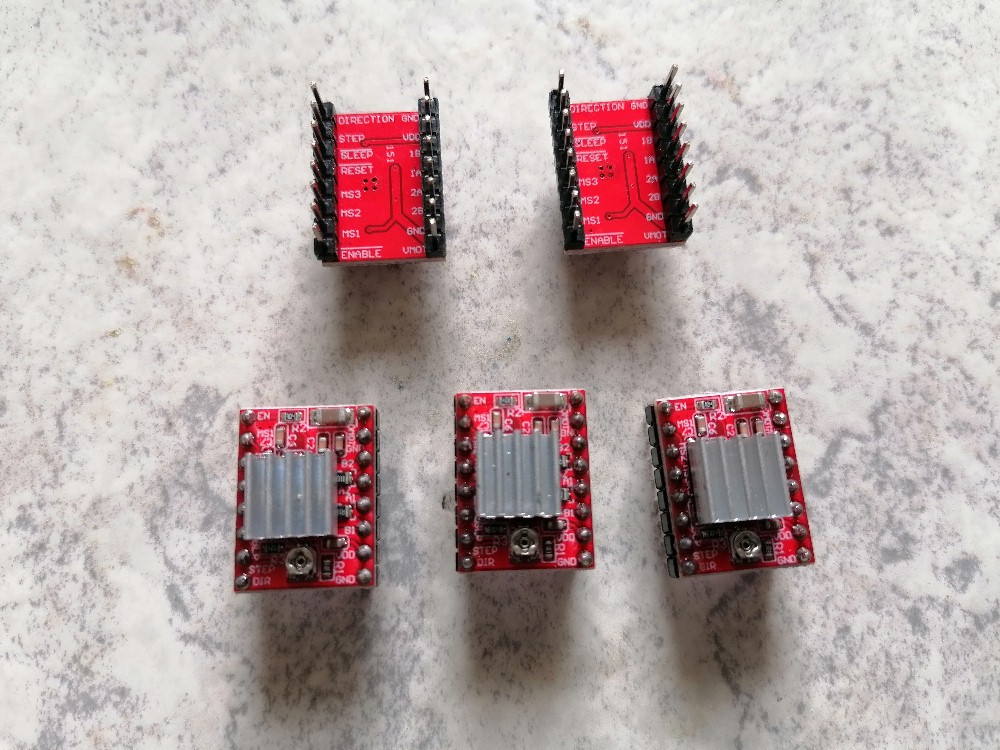
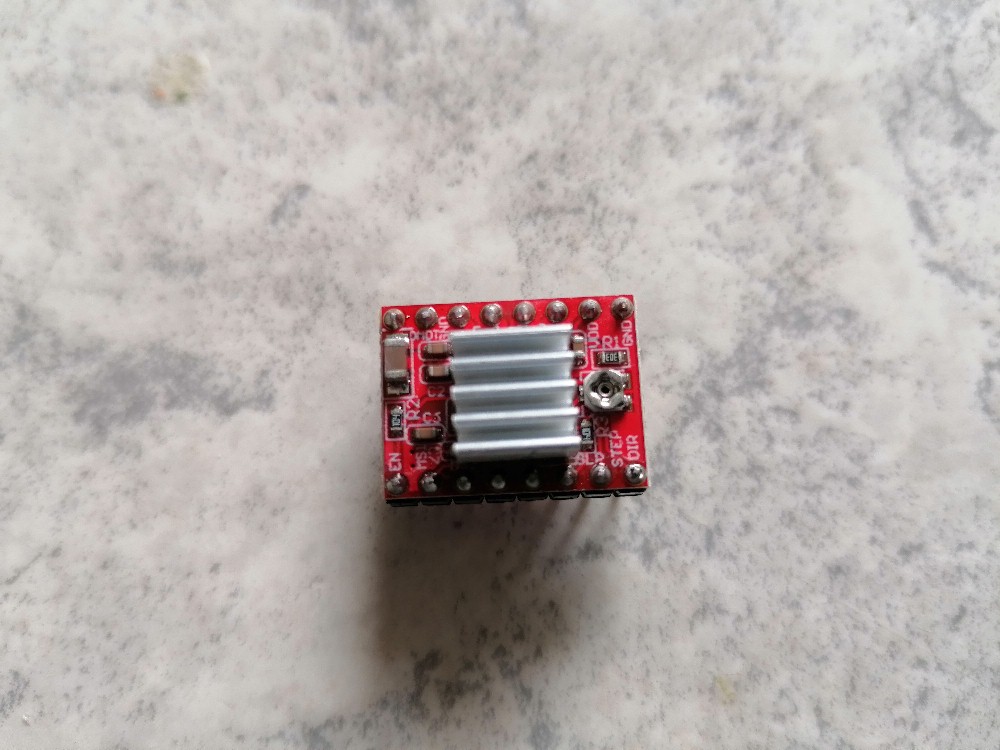

Der Treiber unterstützt wiefolgt auch Mikroschritte: 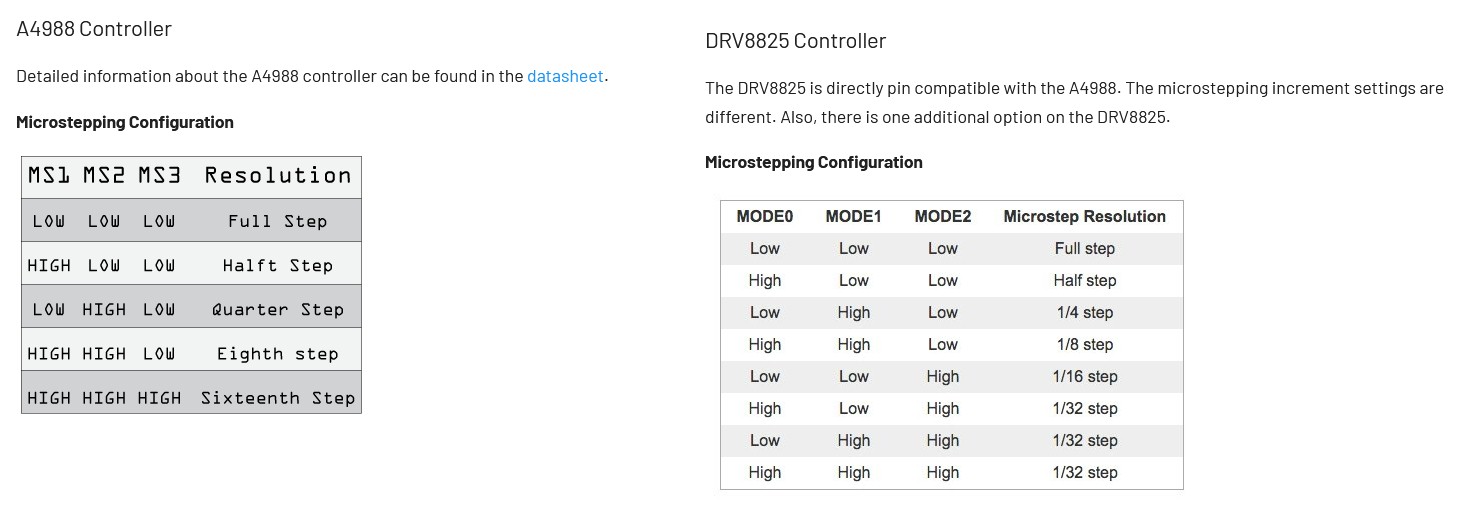
Zur leichteren Ausrichtung der Drehachse genau in Richtung Himmelsnordpol habe ich mir ein günstiges 5 x 24 Sucherfernrohr bestellt:
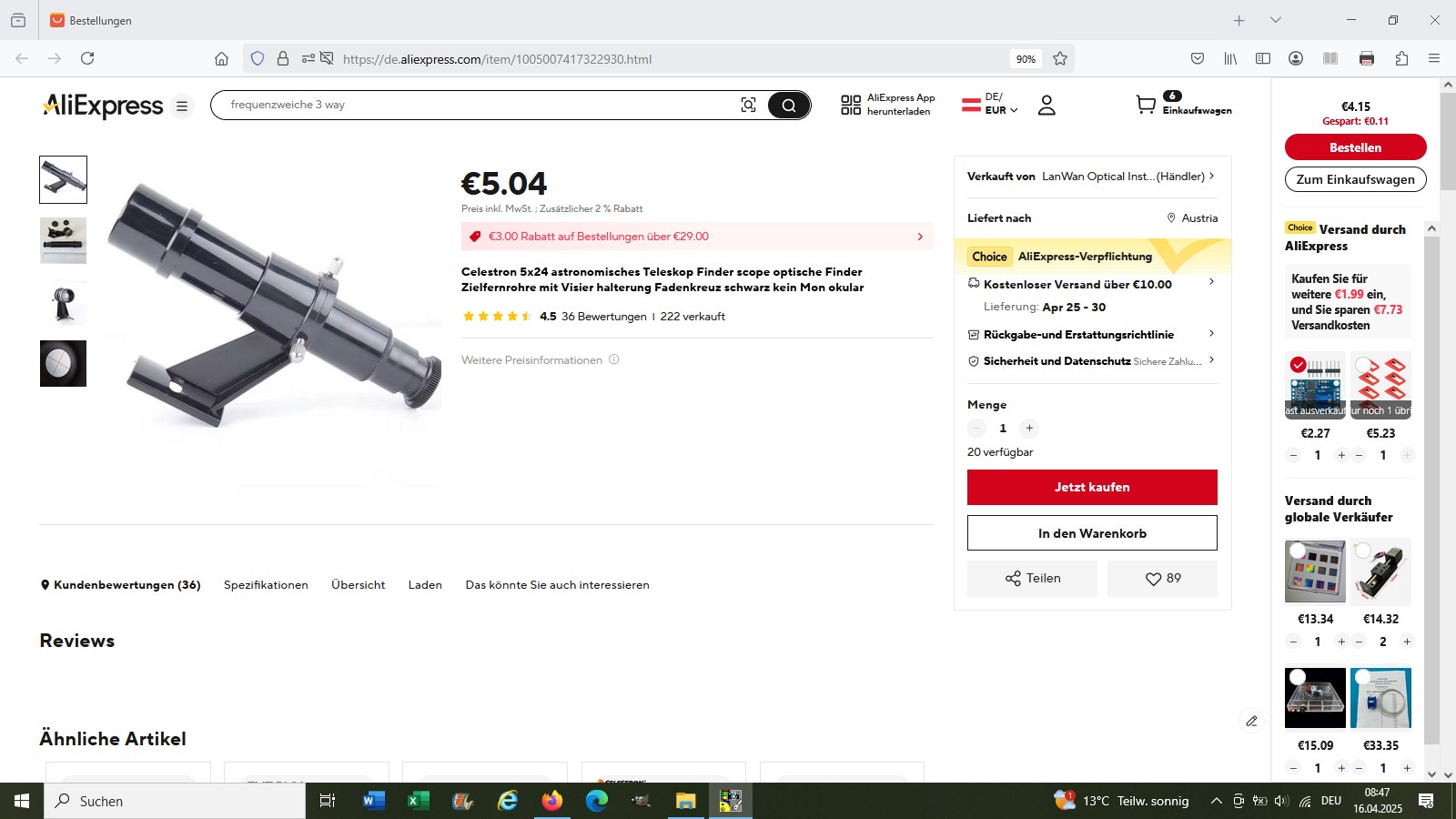
Dieses besitzt ein Fadenkreuz. Der Himmelsnordpol weist 2025 eine Abweichung von ca. 38 Bogenminuten zum Polarstern auf. Daher kann es mitunter nicht mehr ausreichen, die Drehachse der Holzklappenmontierung auf den Polarstern auszurichten. Ich werde daher auf die Fadenkreuzplatte einen Kreis mit 38′ Radius aufzeichnen. Dazu visiere ich einmal unseren Mond an, welcher einen mittleren Durchmesser von 31′ besitzt. Kenne ich dessen Größe im Sucherfernrohr, kann ich die benötigte Strecke von 38′ abschätzen.
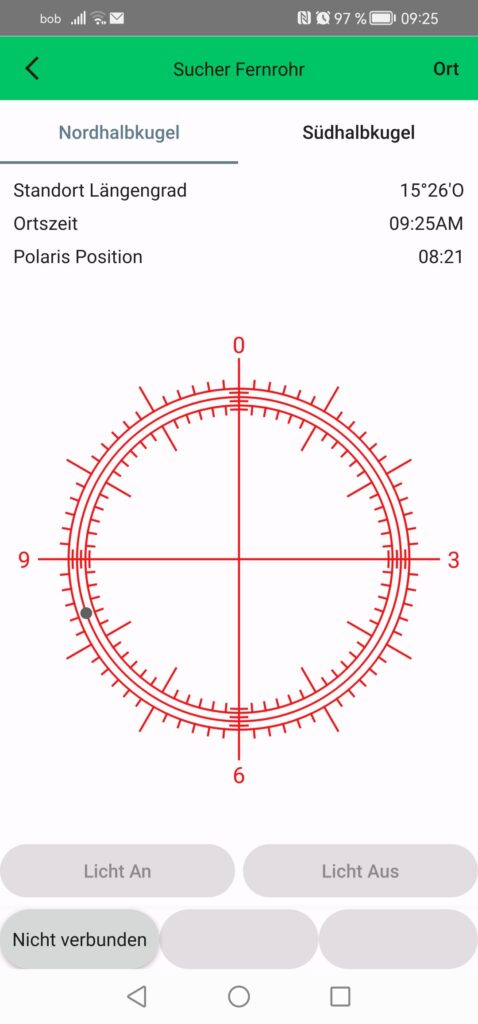
Mittels einer Smartphone-App informiere ich mich dann immer über die aktuelle Position des Polarsterns relativ zum Himmelsnordpol:
Die 80 x 20 cm messende Holzplatte habe ich mir im Baumarkt zuschneiden lassen und dort auch gleich die M6 Gewindestange besorgt:


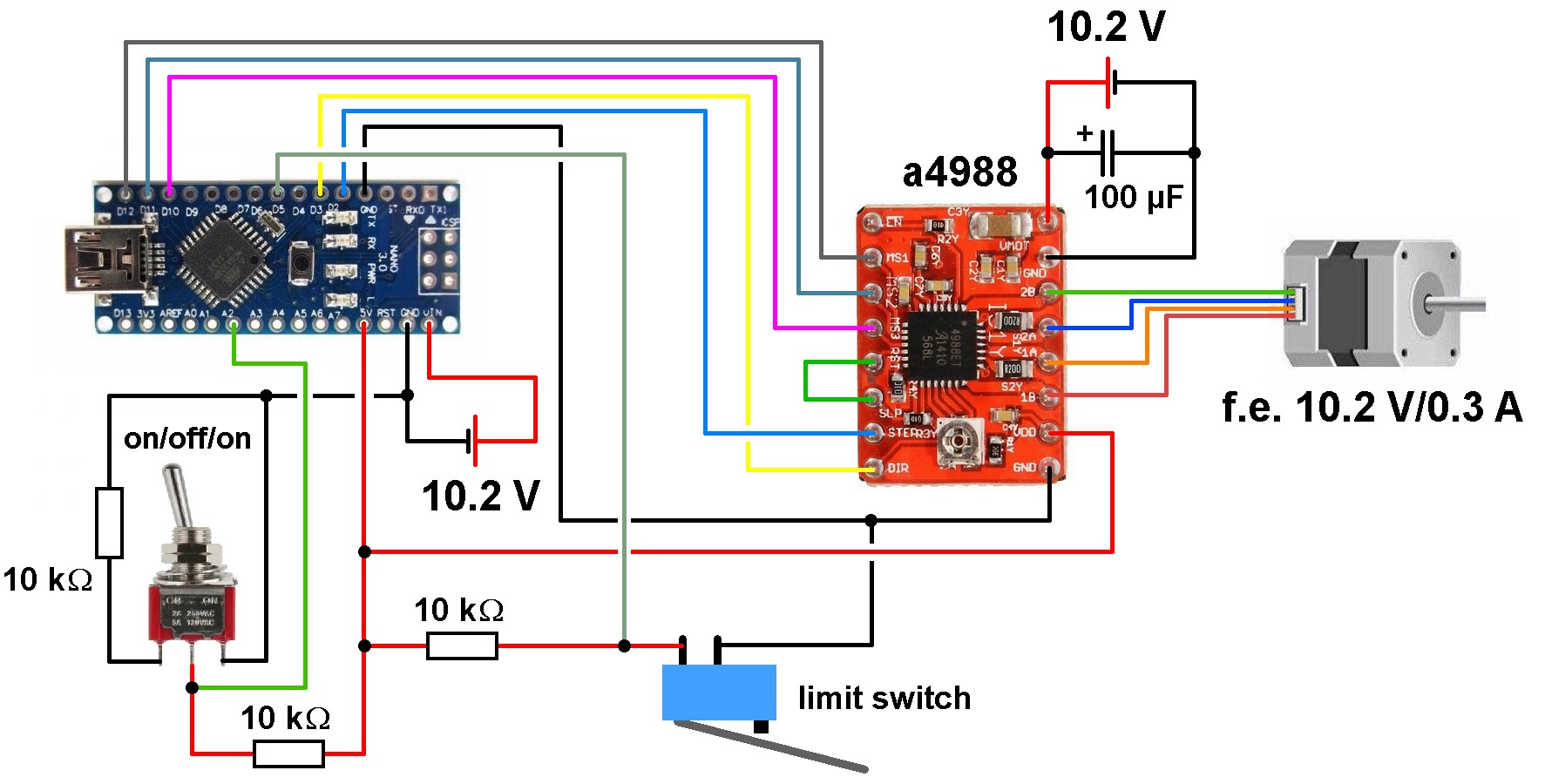
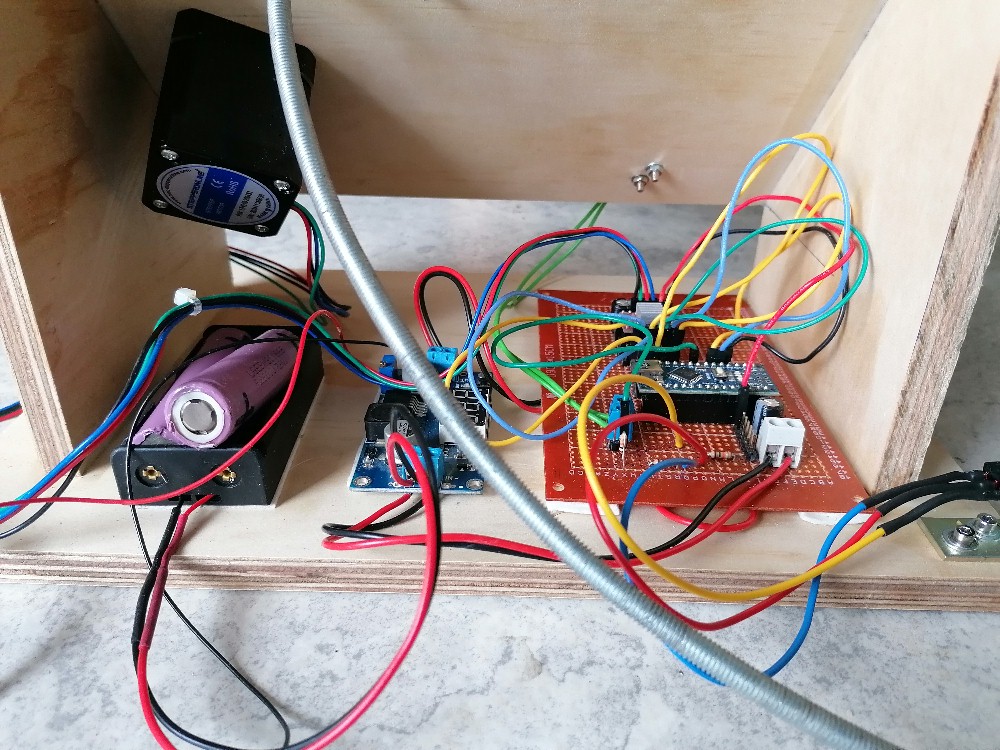
Der komplette Schaltplan:
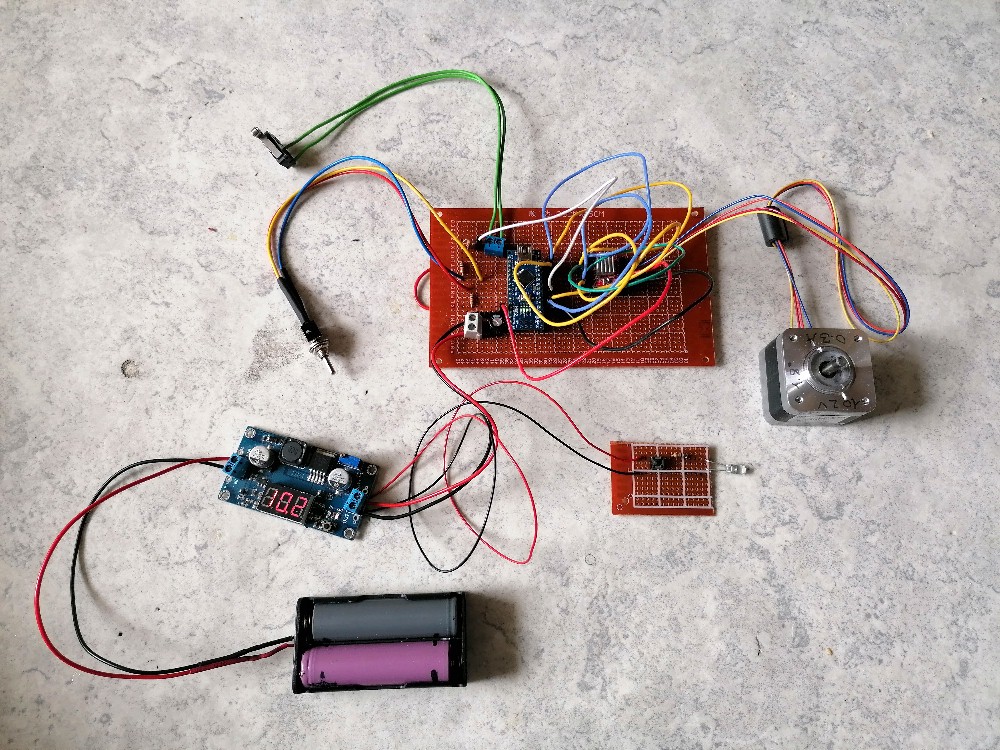
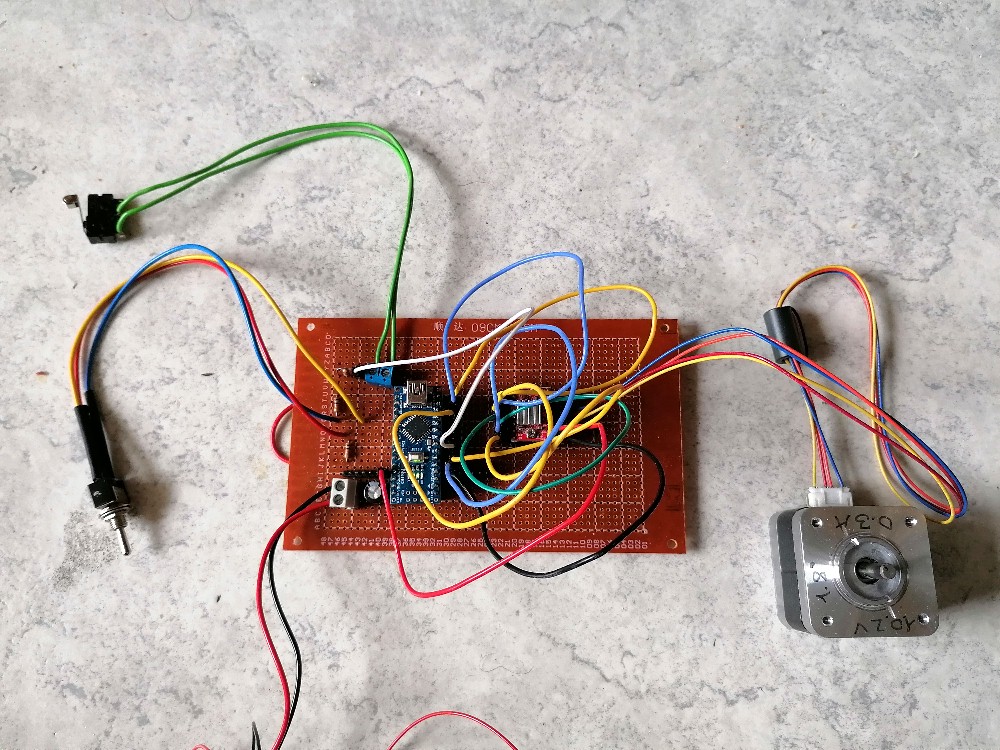
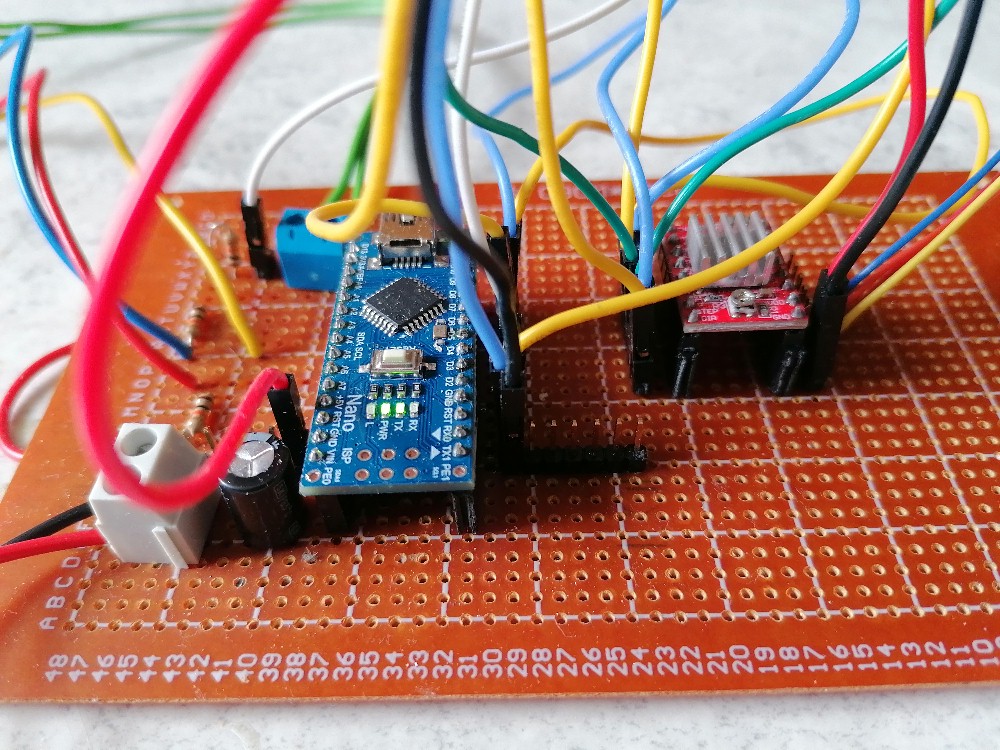
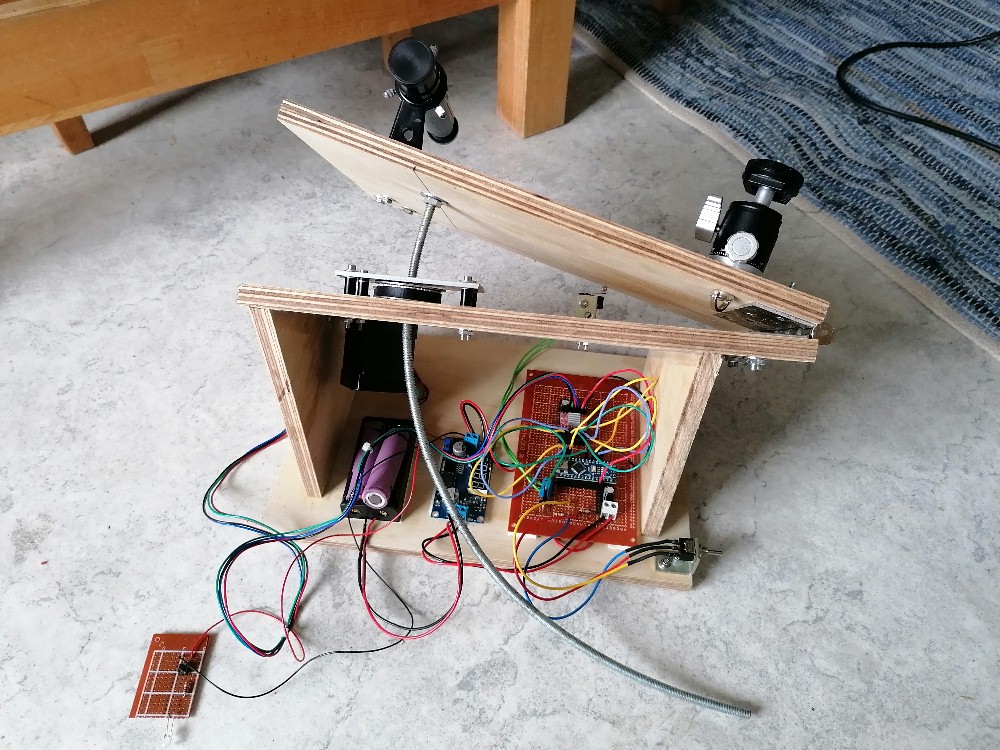
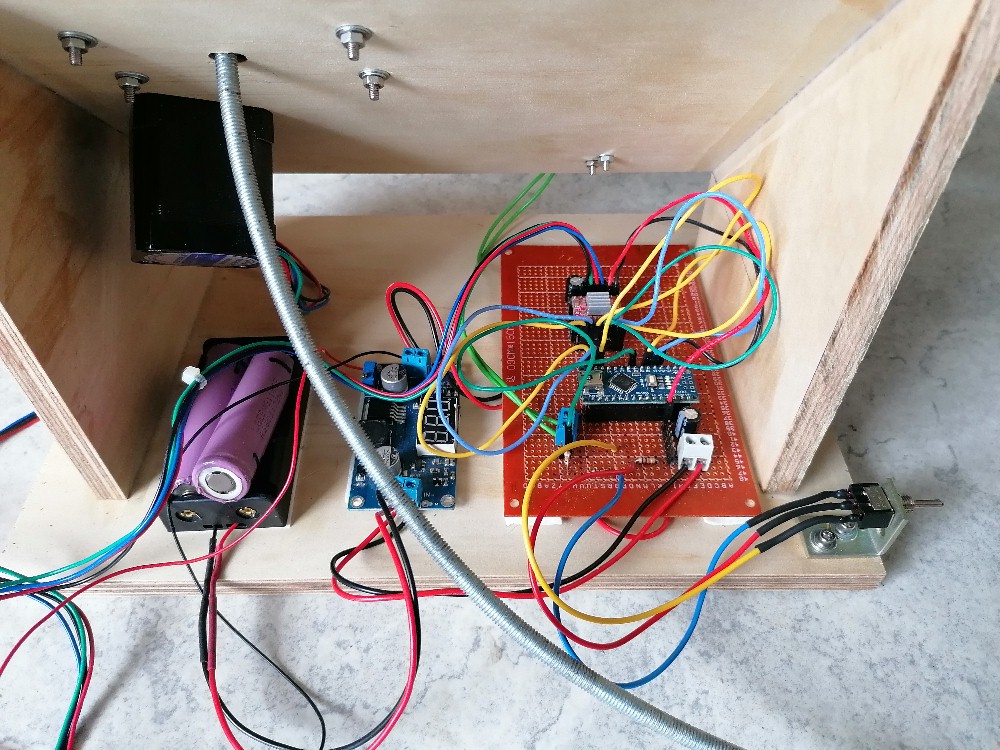
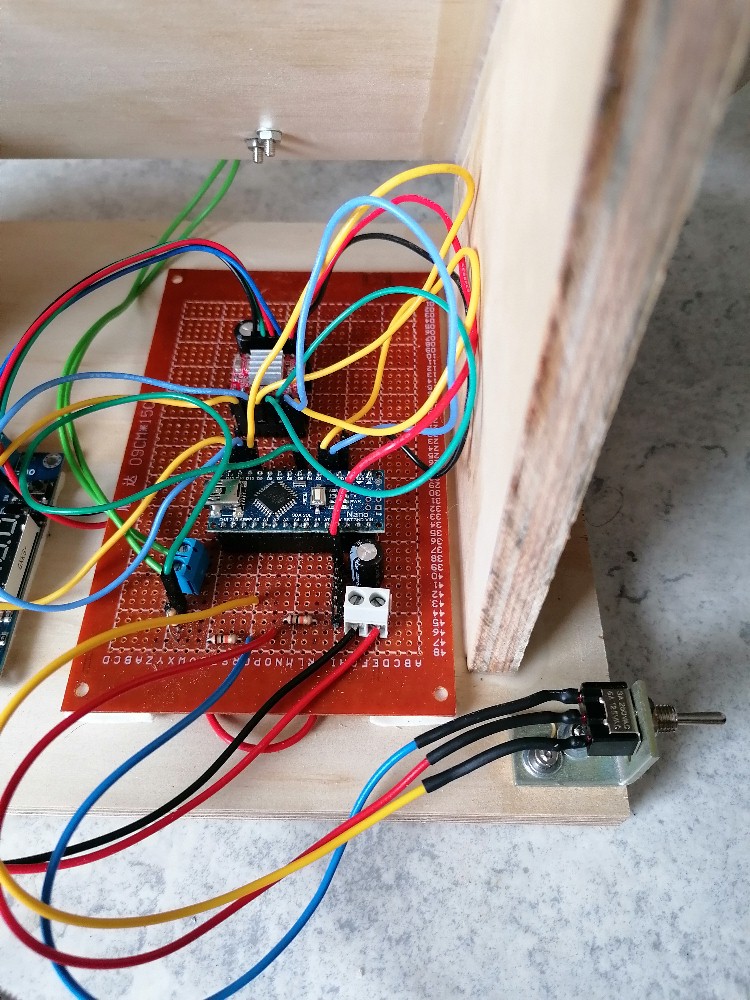
Und hier die Elektronik in natura:
Die beiden in Serie geschalteten 18650 Liion-Akkus, welche eine Spannung von ca. 8V liefern:
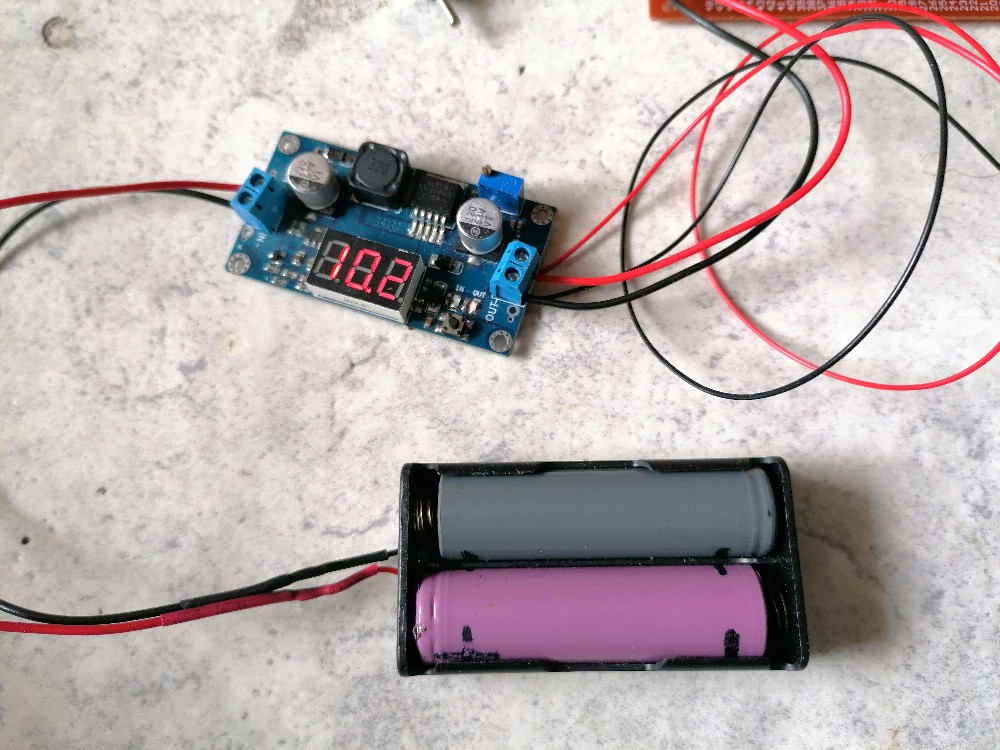
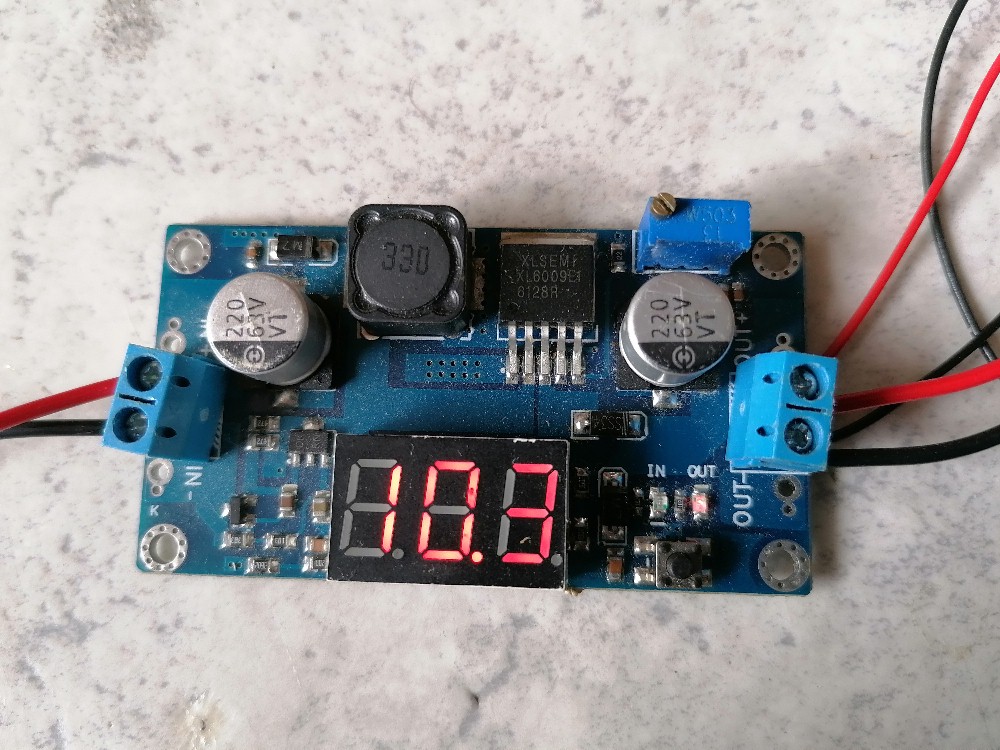
Der Step-up-Wandler zur Erzeugung der 10.2 V für den Arduino und den Schrittmotor:
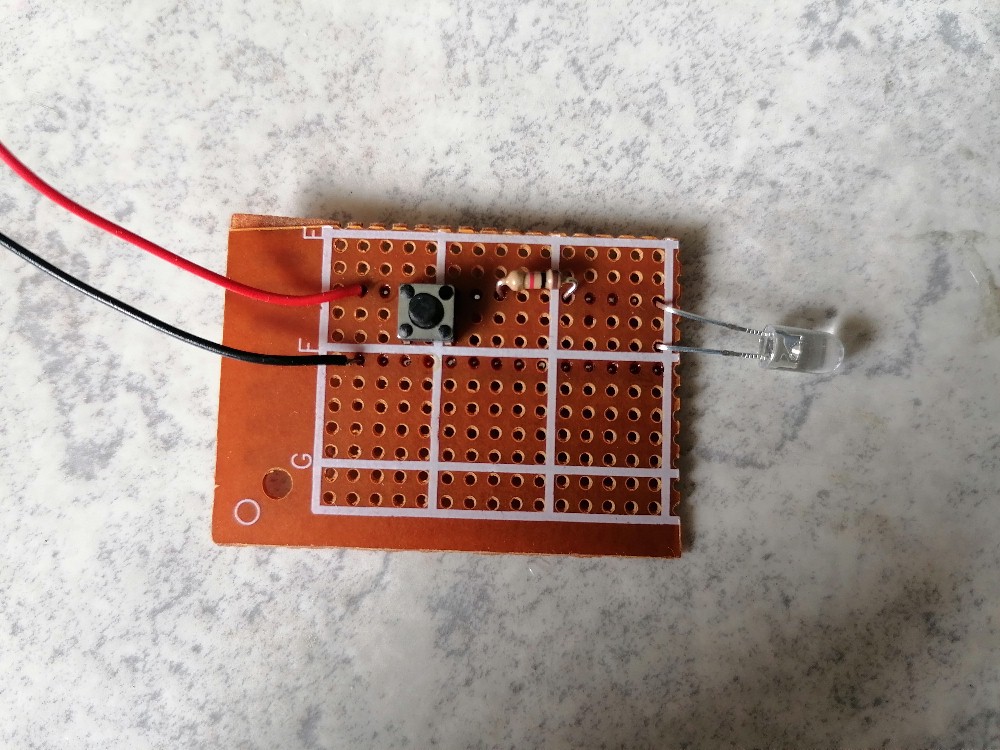
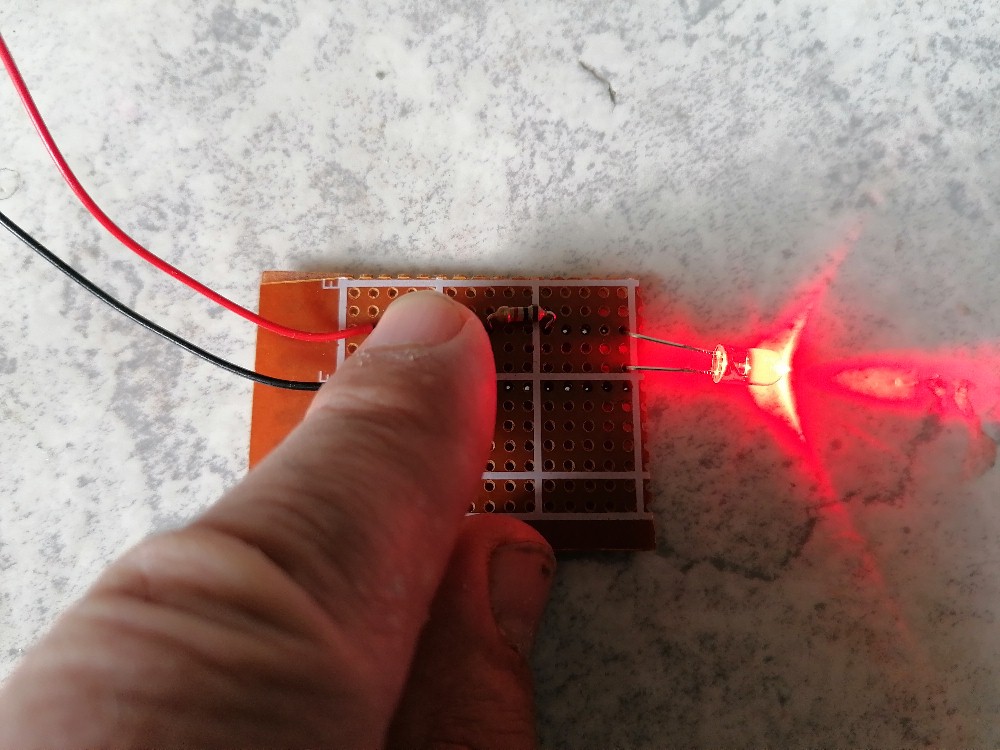
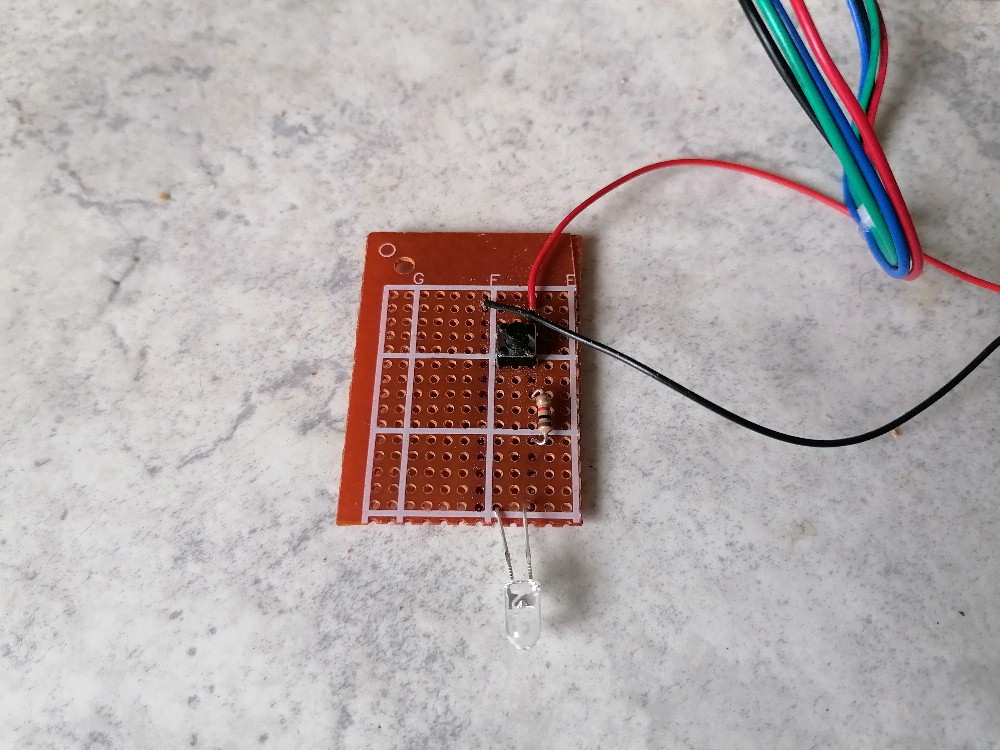
Damit ich die von mir eingezeichnete Kreismarkierung im Sucherfernrohr zur Ausrichtung der Montierung gut sehen kann, verwende ich eine rote LED mit Taster:
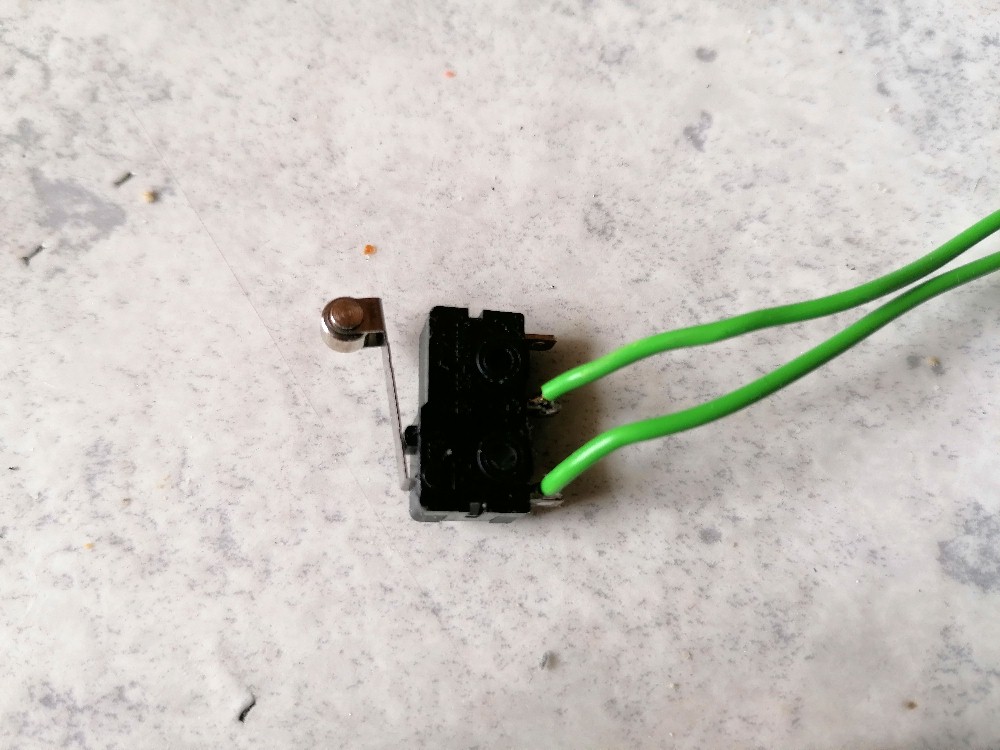
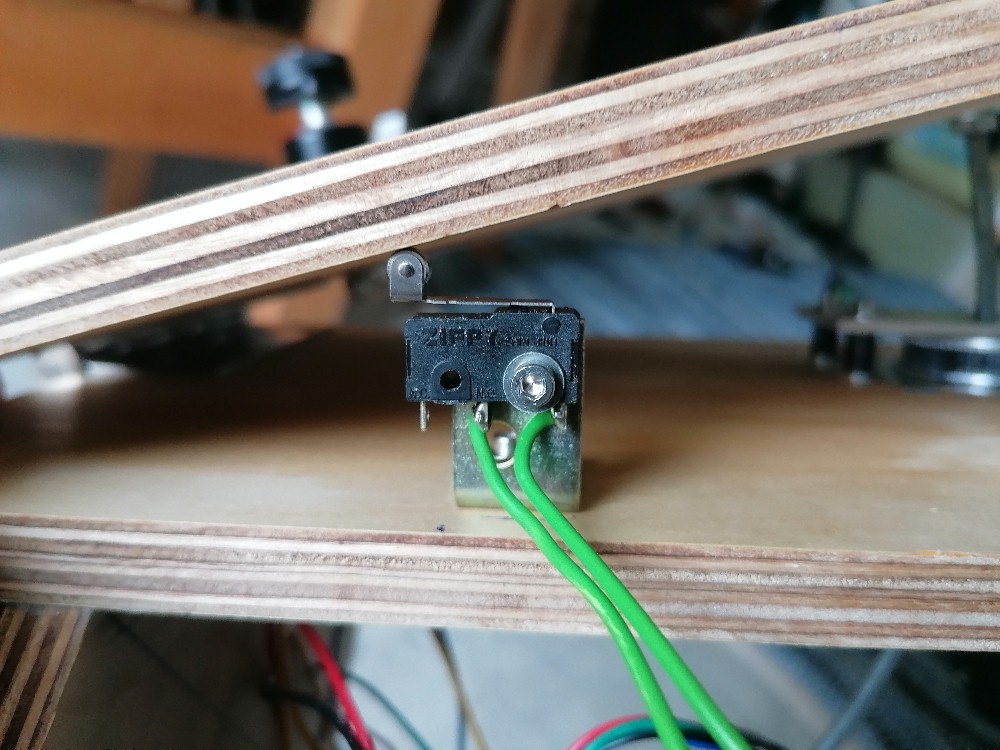
Der Endschalter, welcher den Motor ausschaltet, sobald die Holzklappe wieder in die Startposition zurückgefahren ist:
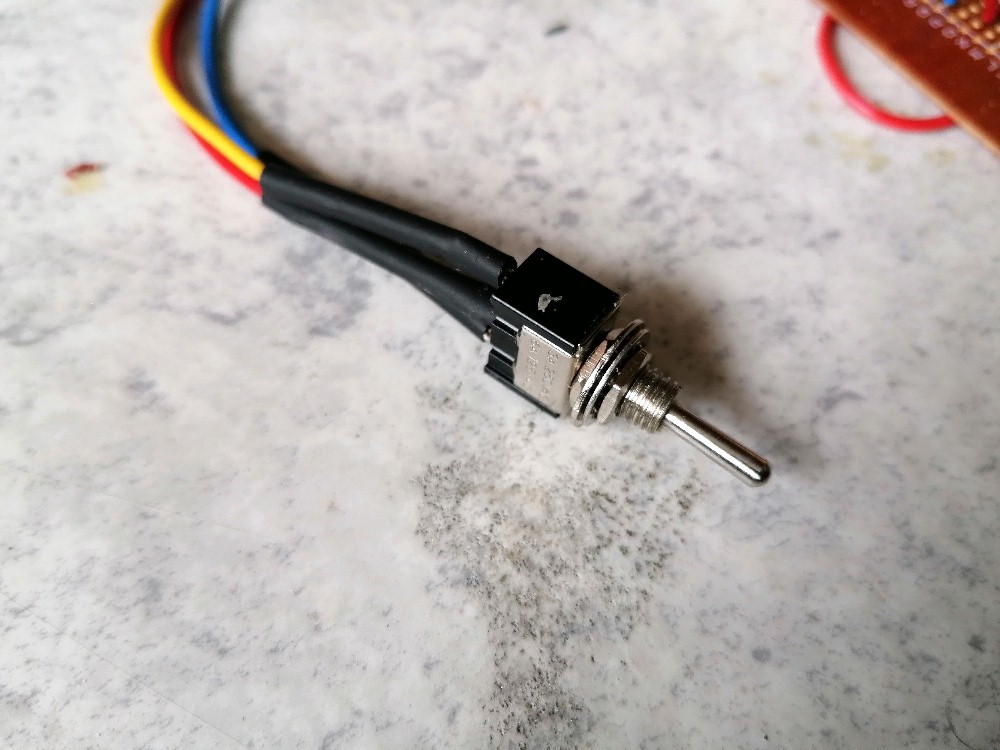
Mit dem on/off/on Schalter wähle ich die 3 Modi: Nachführung/Stop/schnell retour in Startposition
Die Synchronräder mit 60 bzw. 20 Zähnen sind heute angekommen, sodass das mühevolle Absägen des Aufsatzes starten konnte:



In die 5 mm Bohrung habe ich dann ein M6-Gewinde geschnitten:




Jetzt hoffe ich nur, dass dann die zu einem Kreisbogen mit r = 228.5 mm gebogene Gewindestange durch das Synchronrad läuft…

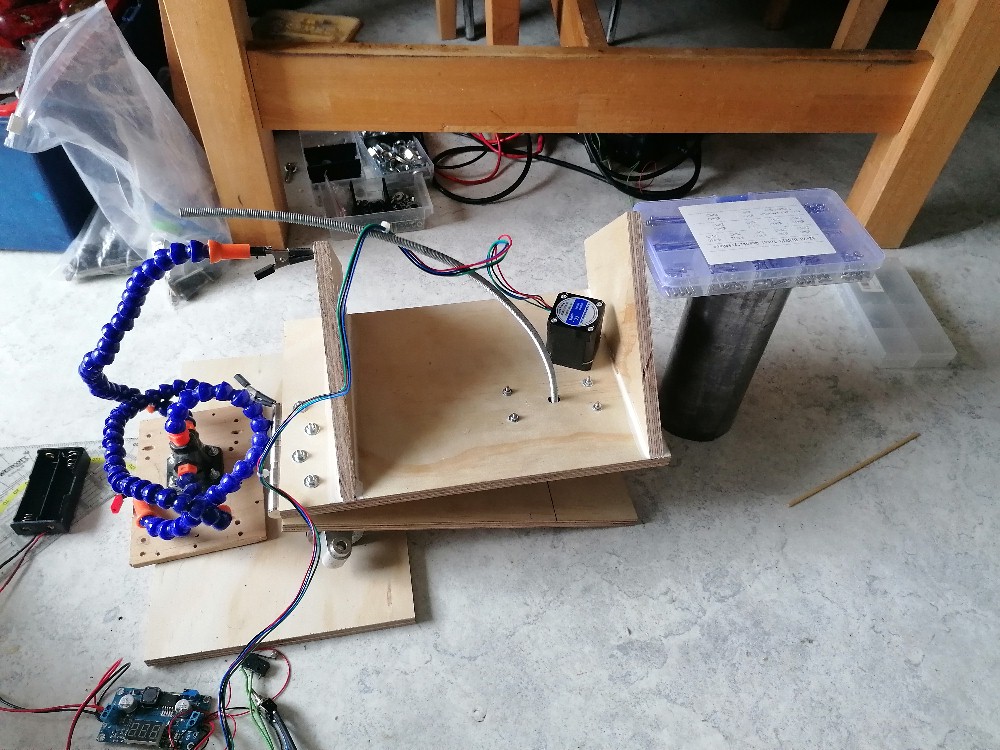
In der Zwischenzeit konnte ich mich um den mechanischen Aufbau kümmern. Wenn ich mit meinen Projekten loslege, sieht es zumeist so in meiner Küche aus:

Die M6-Gewindestange musste zu einem Kreis mit r = 228.5 mm gebogen werden:


Die beiden Holzbretter mit den Maßen 30 cm x 20 cm:

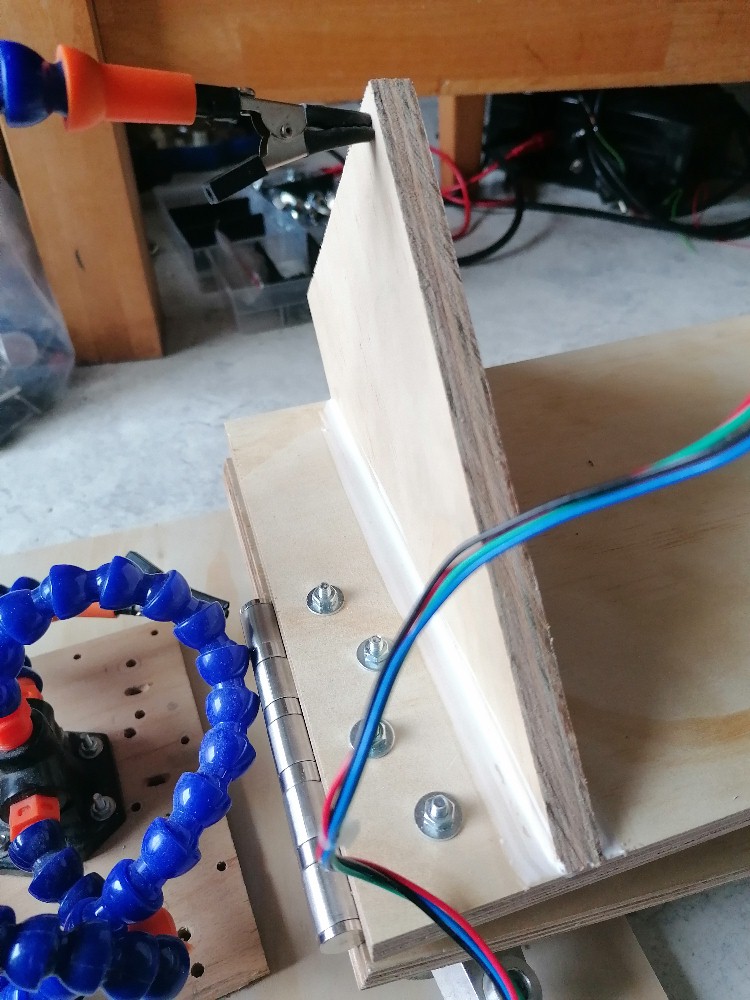
Ich probiere es einmal mit nur einem Scharnier:


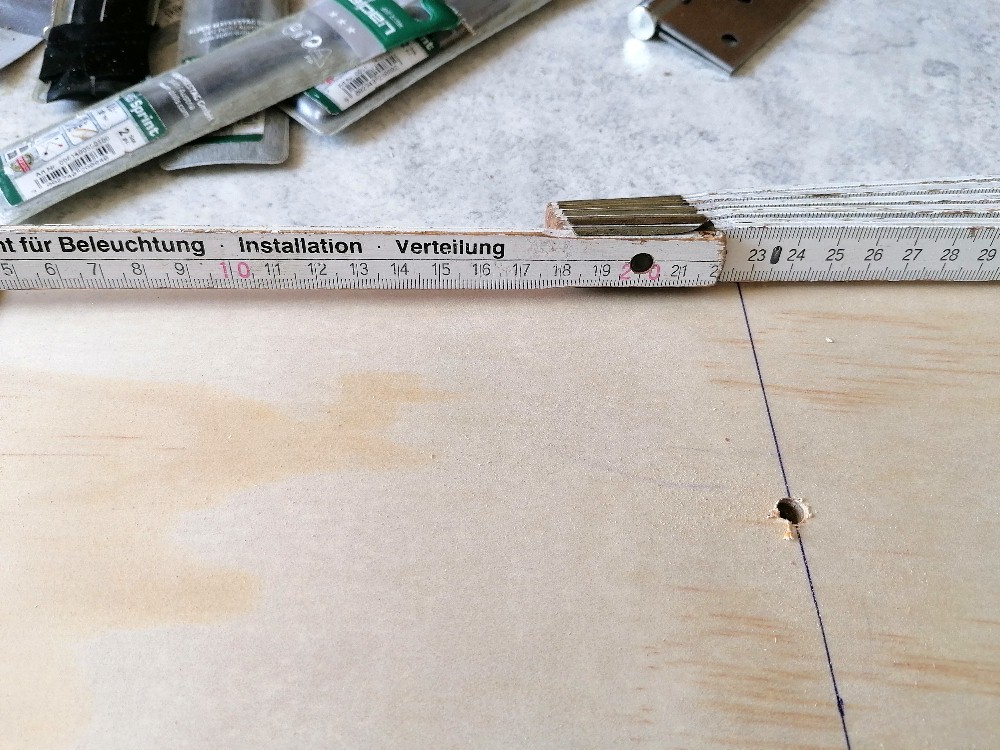
Die beiden Löcher in den Holzbrettern müssen natürlich auch einen Abstand von 228.5 mm zur Scharnierachse haben:



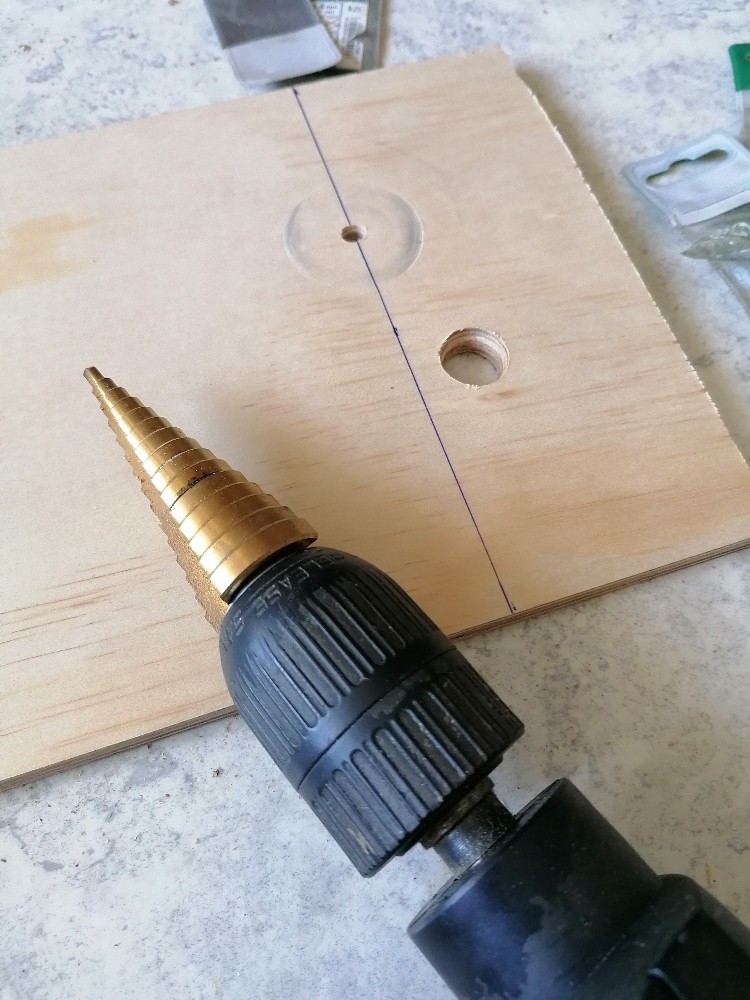
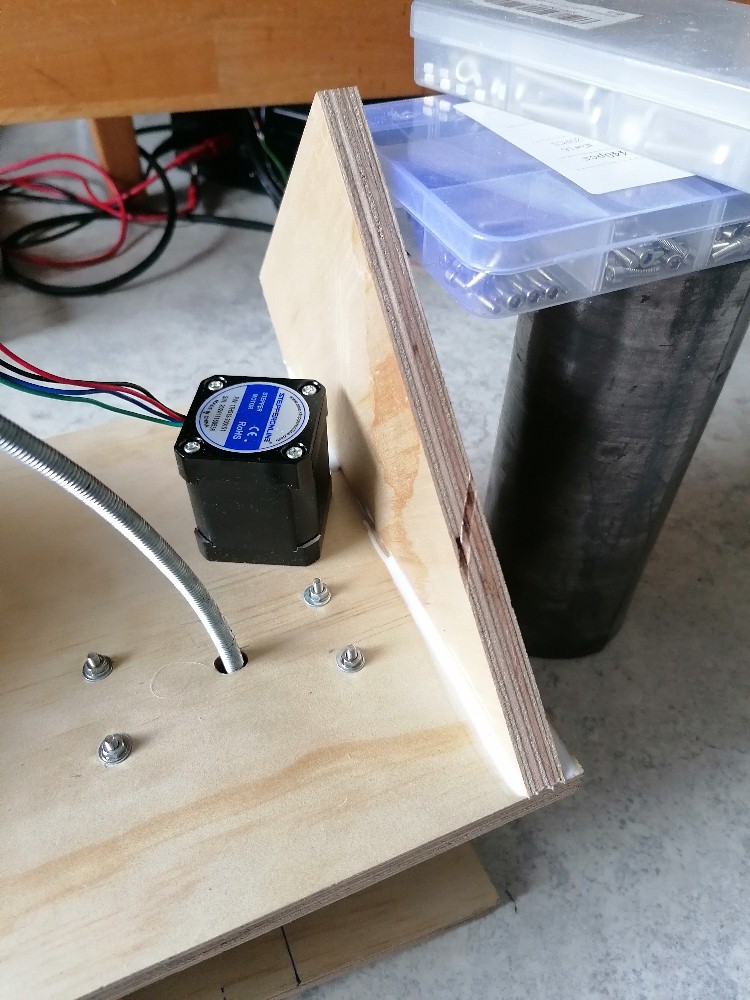
Für das auf der Motorwelle befindliche Zahnrad musste ich ein großes Loch ins Holzbrett bohren:
Die kreisförmige Erhöhung auf dem Schrittmotor störte und musste weg:

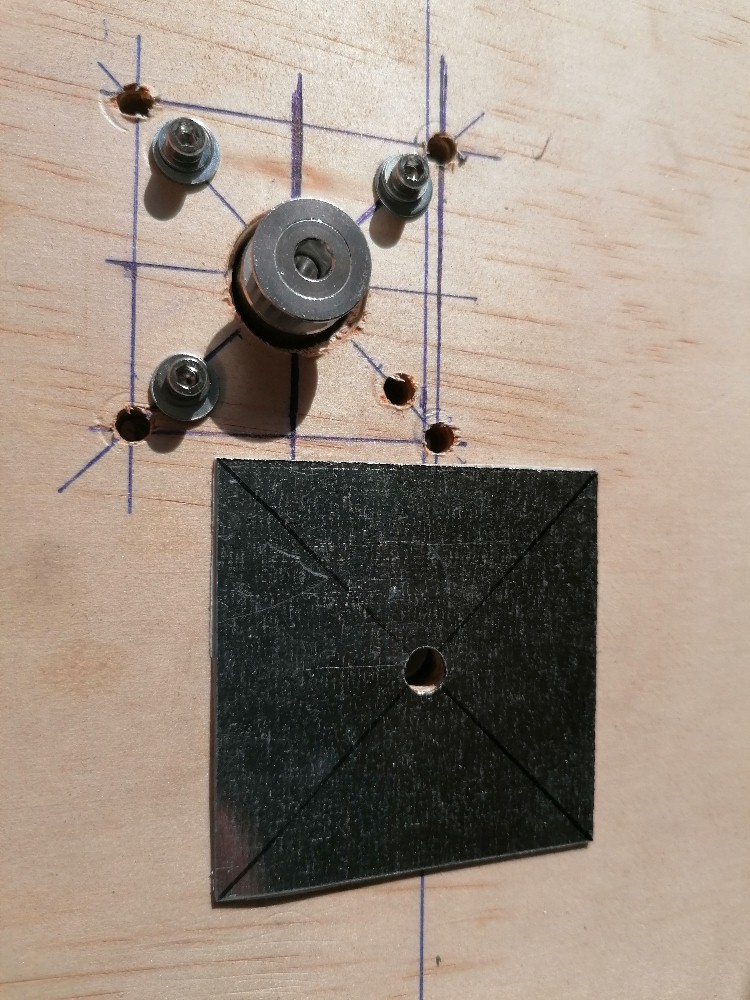
Beim Bohren der Löcher für den Motor unterlief mir dann ein Fehler, indem ich für deren Abstand die Lochdiagonale verwendete. Auch wäre es besser gewesen die 4 Löcher so auszurichten, daß das Gummiband nicht mit einem der Löcher kollidiert. So konnte ich nur 3 der 4 Löcher verwenden, was aber auch nicht so tragisch ist…
Damit das große Synchronrad bei dessen Rotation nicht direkt auf dem Holz reibt, habe ich ein Stück Aluminiumblech aufgeklebt und dieses geölt:

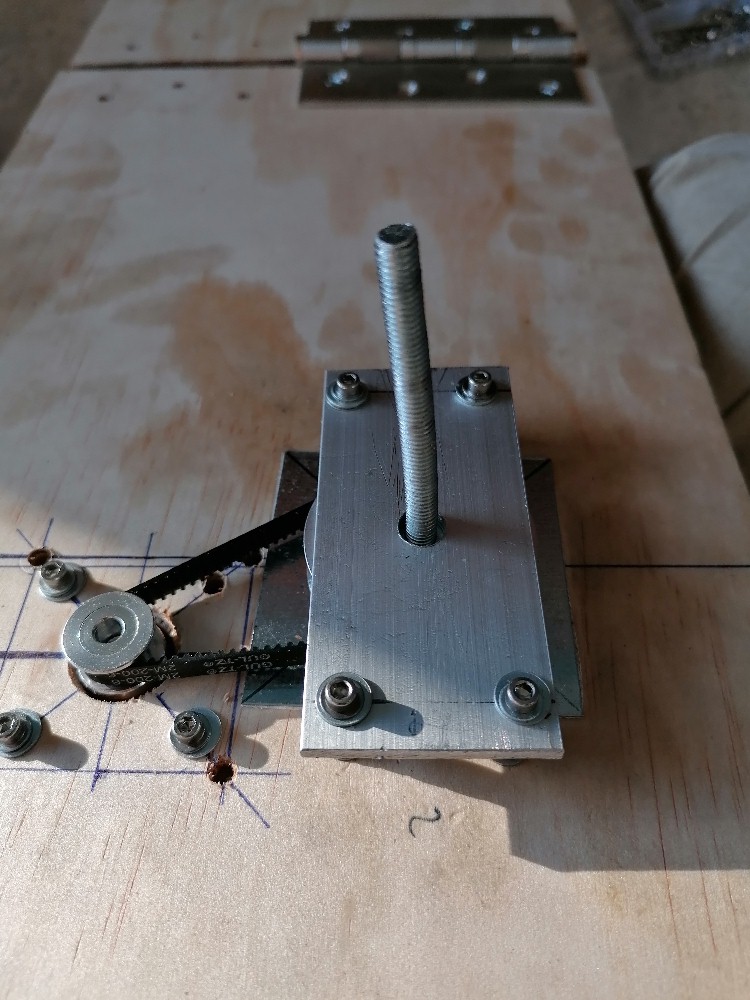
Bei der Rückstellung des Holzbrettes dreht sich das große Synchronrad ja in die andere Richtung. Damit es dabei nicht die Gewindestange hochläuft musste ich eine Aluplatte einbauen:
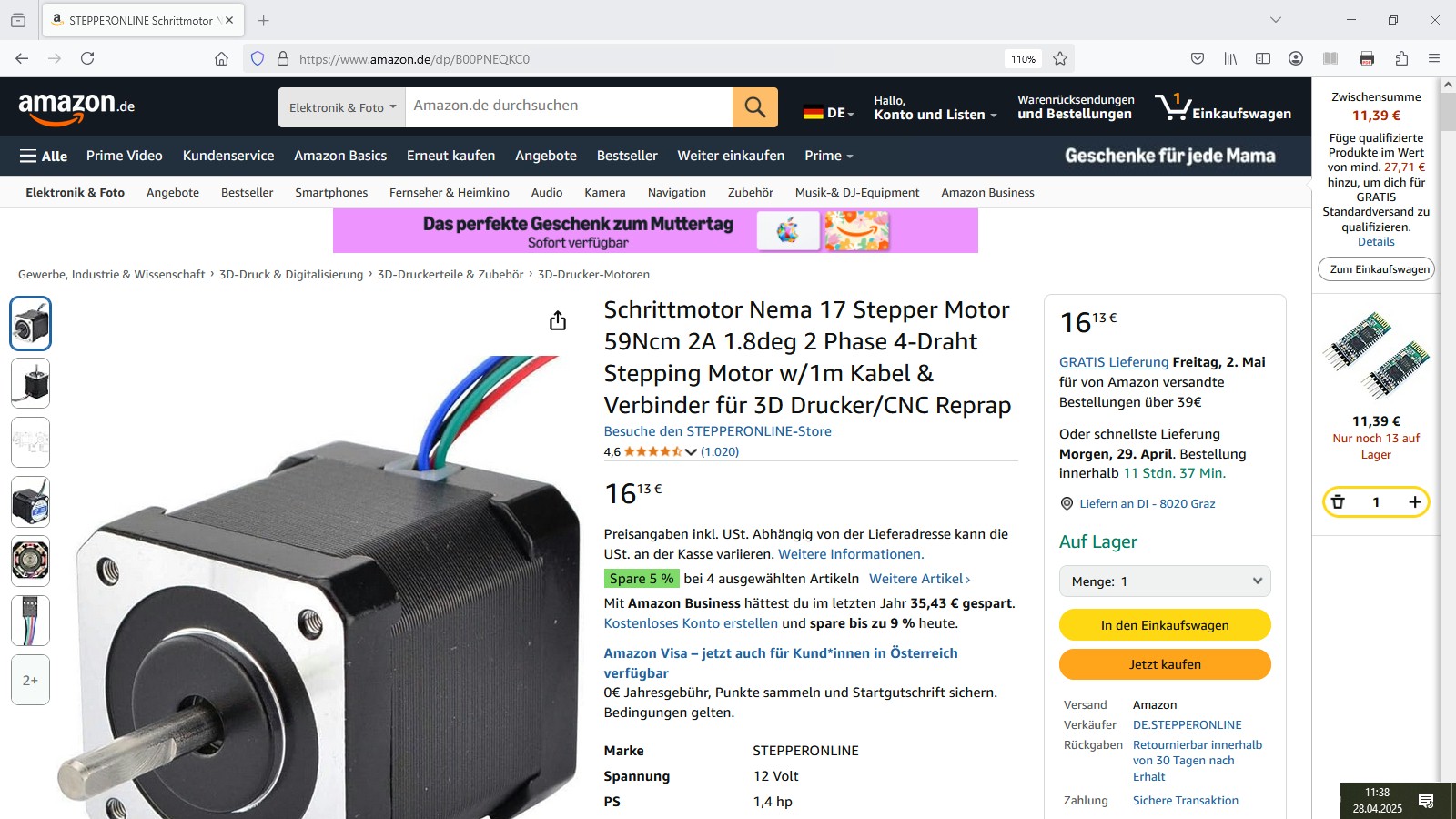
Leider stellte sich dabei heraus, dass mein Motor im Schnelllaufmodus (= Holzplatte wieder zurück in die Ausgangsposition) zu schwach ist und blockiert. Sein Drehmoment ist mit 0.28 Nm angegeben. Daher habe ich mich auf Amazon nach einem deutlich stärkeren Schrittmotor umgesehen und diesen hier mit 0.59 Nm bestellt:
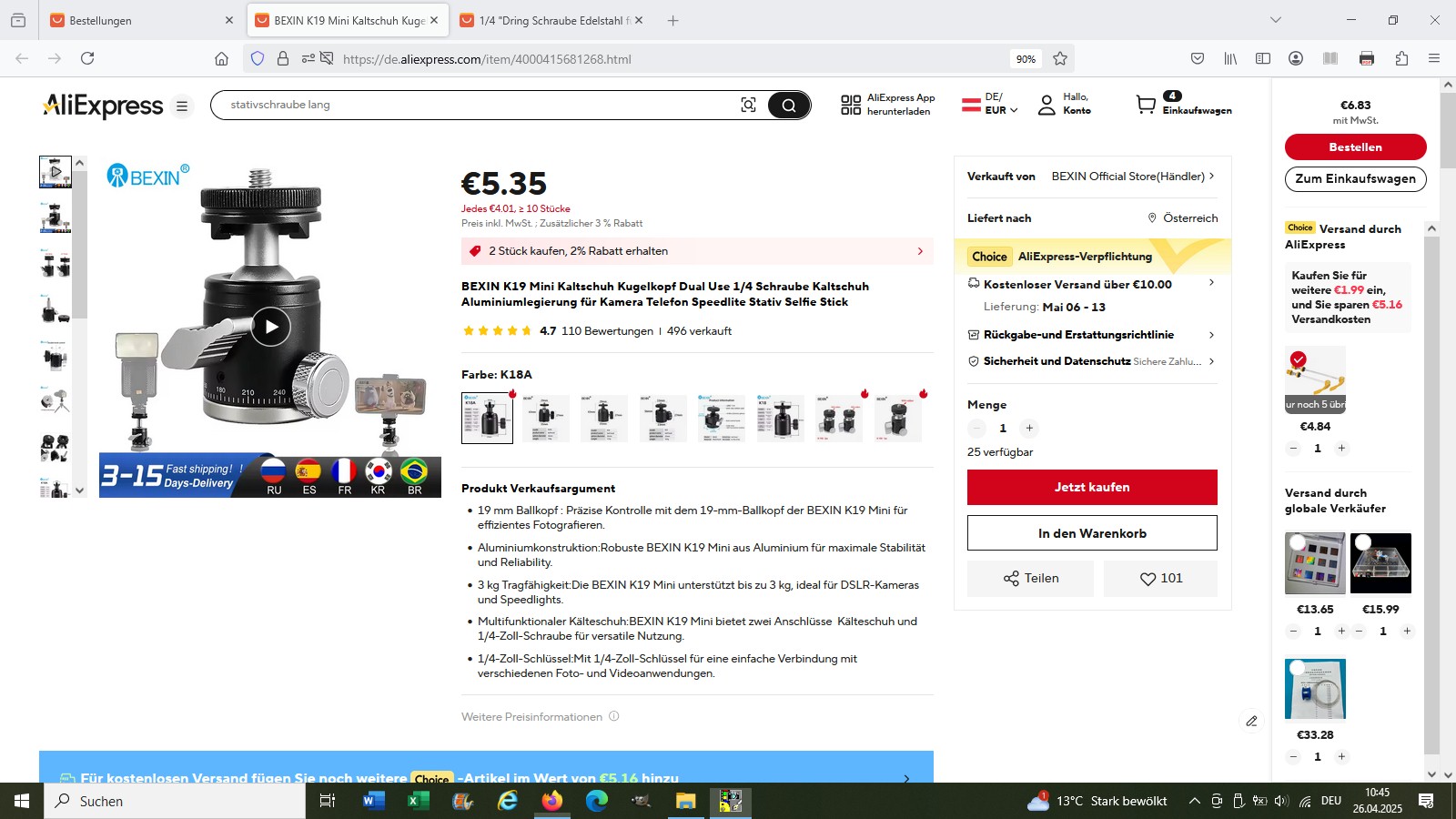
Das kleine Kugelkopfstativ zur Befestigung der Kamera auf der Holzplatte ich auch schon angekommen:

Wenn der Hund Shady meiner Tochter bei mir zu Gast ist und ich gerade eine Lieferung von Aliexpress bekomme, ist er dank seiner Neugierde beim Auspacken stets dabei 😉

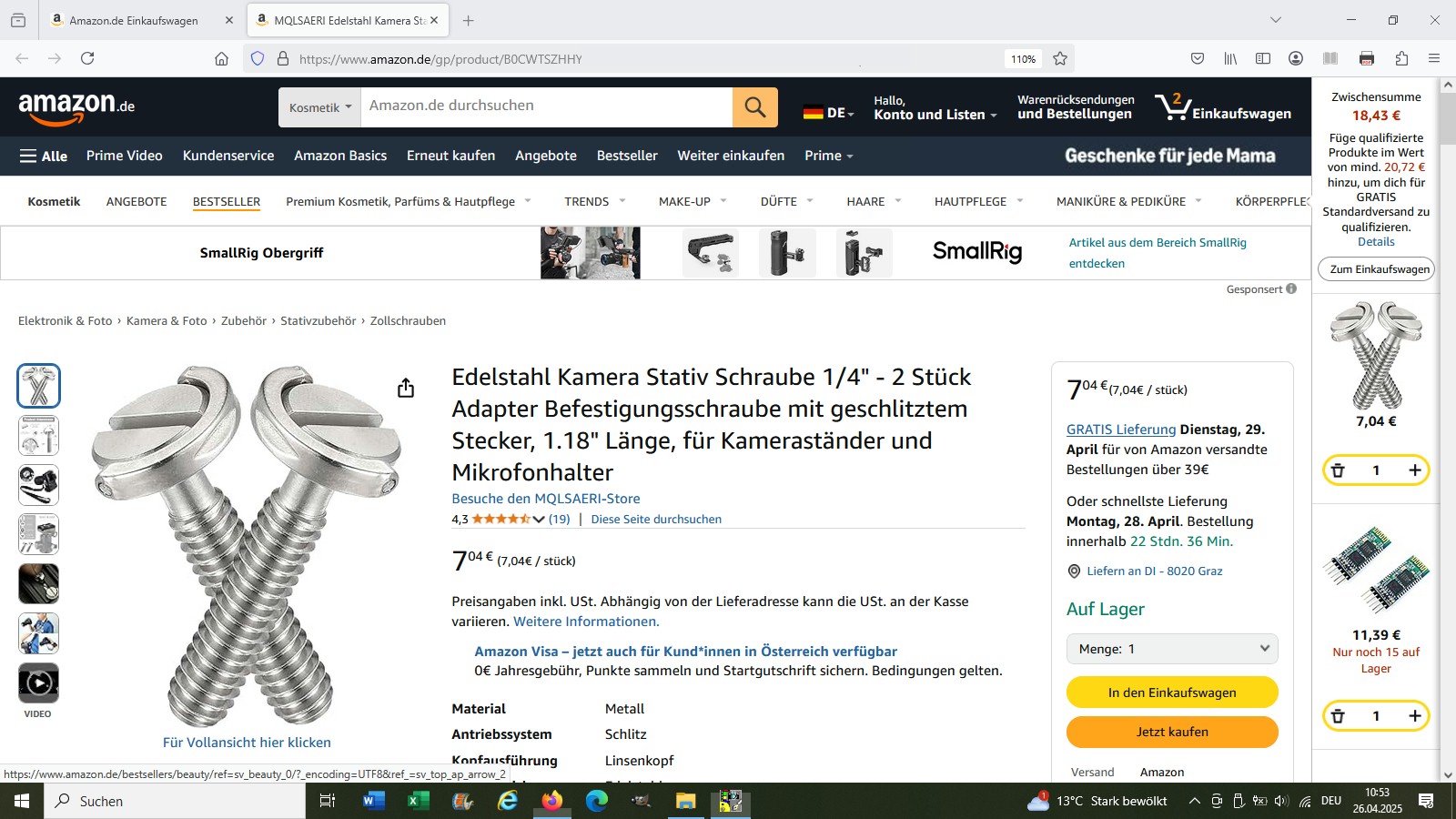
Auf Amazon habe ich dann auch noch gleich zwei extra lange 1/4″ Stativschrauben bestellt:
So, Schrittmotoren, Stativschrauben und Sucherfernrohr sind angekommen:



Zum Glück hatte ich noch weitere Holzplatten, denn für den neuen Schrittmotor benötigte ich andere Befestigungslöcher. Dieses mal habe ich den Schrittmotor aber überlegter ausgerichtet und auch die Löcher richtig gebohrt. 😉

Die extralangen 1/4″ Stativschrauben:

Das kleine 5 x 24 Sucherfernrohr:


Arduino-Code: Die Motorgeschwindigkeit für die Rückkehr in die Ausgangsposition habe ich ein wenig reduziert. Nun scheint der Motor aber stark genug dafür zu sein.
#include <AccelStepper.h>
// Modus: DRIVER = Steuerung über STEP+DIR
AccelStepper stepper(AccelStepper::DRIVER, 2, 3); // STEP an Pin 2, DIR an Pin 3
int switchPin = A2; // select the input pin for the potentiometer
int switchvalue;
void setup()
{
Serial.begin(9600);
stepper.setMaxSpeed(1000); // Max. Geschwindigkeit: 160 Microsteps/s
pinMode(12, OUTPUT); // = MS1
pinMode(11, OUTPUT); // = MS2
pinMode(10, OUTPUT); // = MS3
// MS1 MS2 MS3 Resolution
// LOW LOW LOW full step
// HIGH LOW LOW 1/2 step
// LOW HIGH LOW 1/4 step
// HIGH HIGH LOW 1/8 step
// HIGH HIGH HIGH 1/16 step
pinMode(5, INPUT); // end-switch
}
void loop()
{
switchvalue = analogRead(switchPin);
Serial.println(switchvalue);
if(switchvalue < 100) // switch in the right position - normal star tracking
{
digitalWrite(12,1);
digitalWrite(11,1);
digitalWrite(10,1);
stepper.setSpeed(240);
stepper.runSpeed();
}
if((switchvalue > 450) && (switchvalue < 570) && (digitalRead(5) == HIGH)) // switch in the left position and limit-switch not activated - go home fast
{
digitalWrite(10,0);
digitalWrite(11,0);
digitalWrite(12,0);
stepper.setSpeed(-100);
stepper.runSpeed();
}
if((switchvalue > 450) && (switchvalue < 570) && (digitalRead(5) == LOW)) // switch in the left position and limit-switch activated - stop
{
stepper.stop();
}
if(switchvalue > 900) // switch in the middle position - stop
{
stepper.stop();
}
}
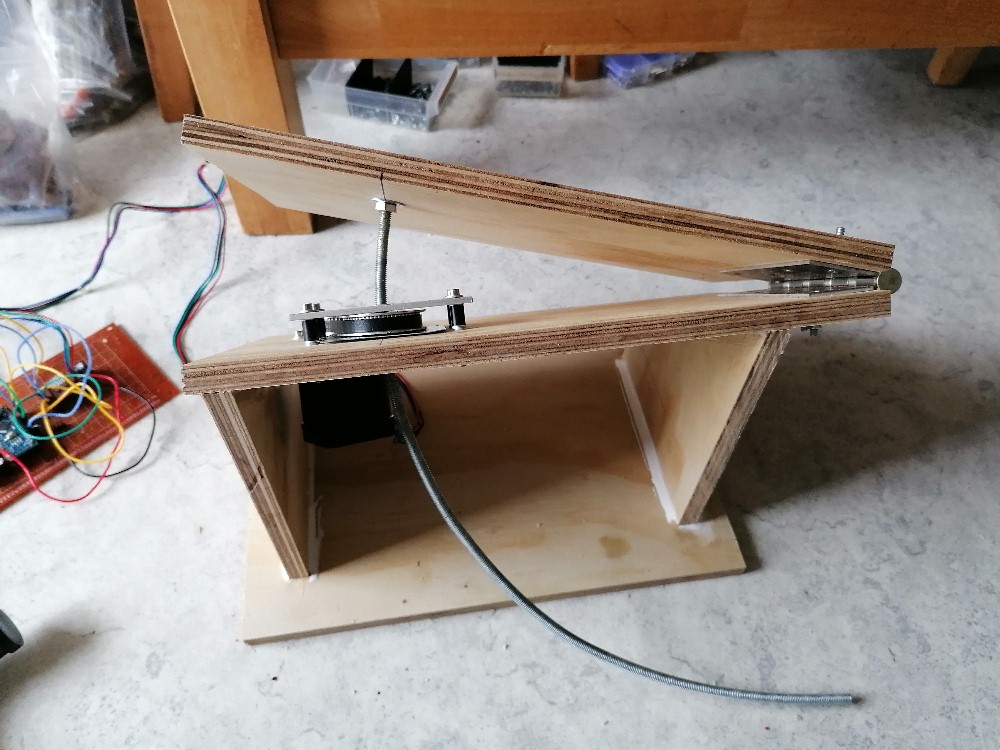
Damit ich das Stativ nicht um die geografische Breite (bei mir rund 47°) neigen muss, habe ich der Montierung Keile mit eben diesem Winkel verpasst. So muss die Basisplatte der Holzklappenmontierung in etwa horizontal ausgerichtet werden.



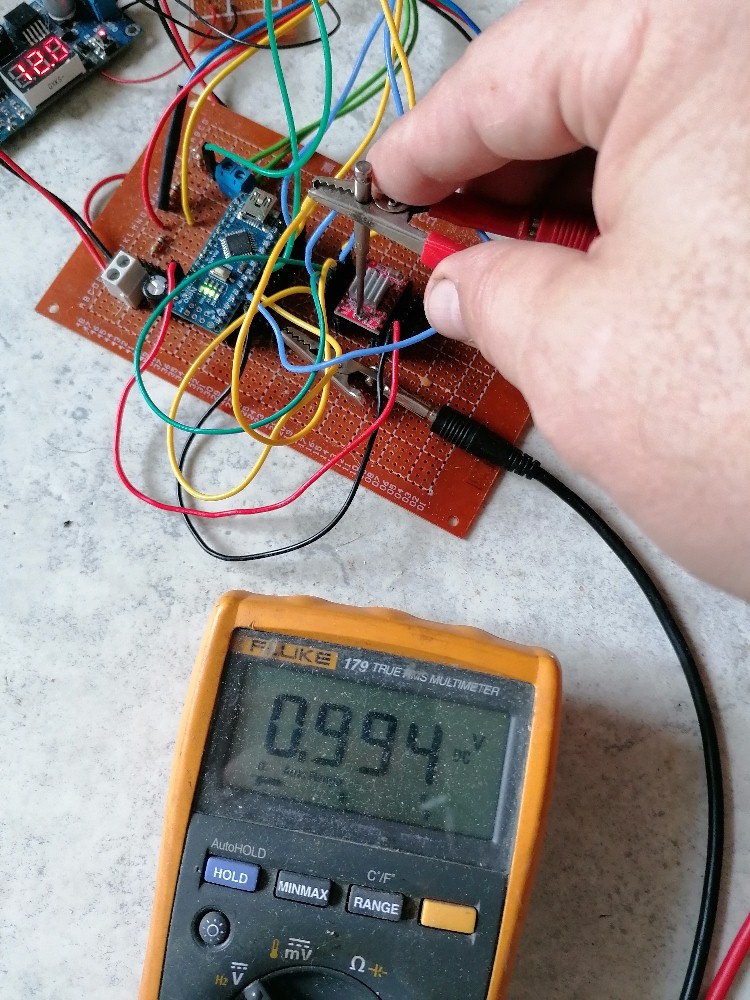
Die Stromstärke des Schrittmotorentreibers habe ich auf ca. 1.9 A eingestellt nach der Formel U = 0.068 · 8 · I:
Der montierte Sucher und Kugelkopf:
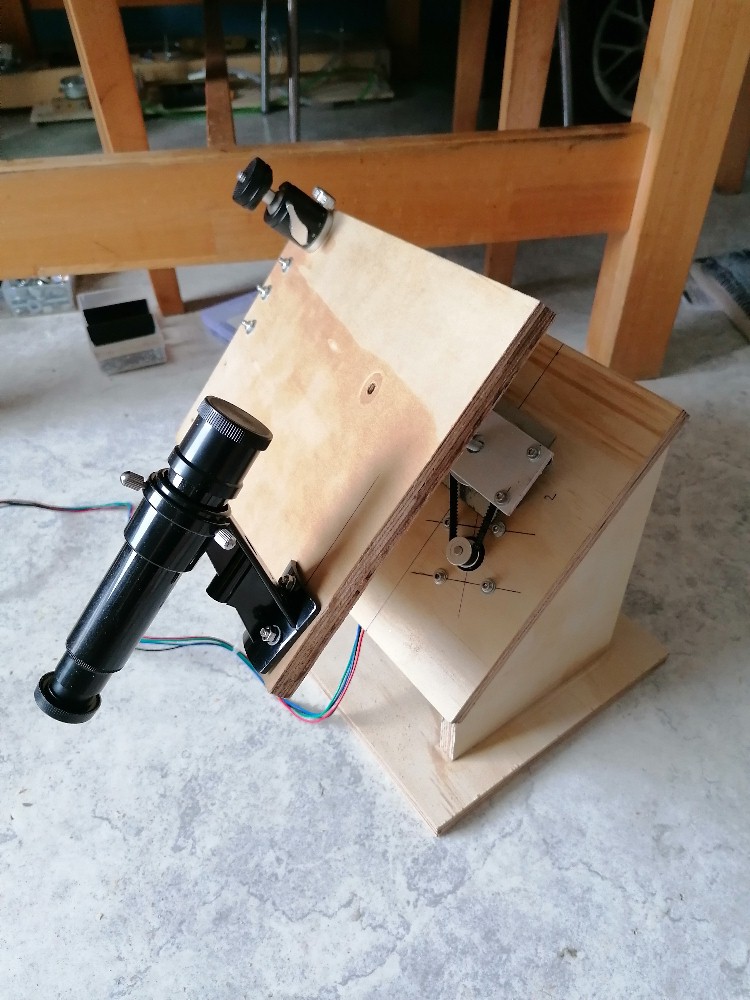


Jetzt fehlt nur noch die Elektronik unterzubringen…

Die rote LED zum Ausleuchten des Suchers:
Rechts erkennt man den Schalter für die 3 Modi:
Der Endschalter, welcher beim schnellen Zurückfahren aktiviert wird:
Die fertige Holzklappenmontierung auf einem Photostativ:

Der gekaufte Kugelkopf erschien mir dann doch deutlich zu klein für meine Canon-Kamera, vor allem wenn ich diese mit dem 300 mm Objektiv betreibe. Daher habe ich mir auf Amazon einen deutlich stabileren Kugelkopf plus 3/8″ Schrauben zur Befestigung besorgt:



Wenn ich Bilder damit aufgenommen habe, melde ich mich wieder…
