
Vor einigen Jahren versuchte ich mich auch an der Umsetzung eines Segways mittels Arduino. Kern des Programms ist die Bestimmung des aktuellen Neigungswinkel und dann die PID-Regelung zur Motoransteuerung.
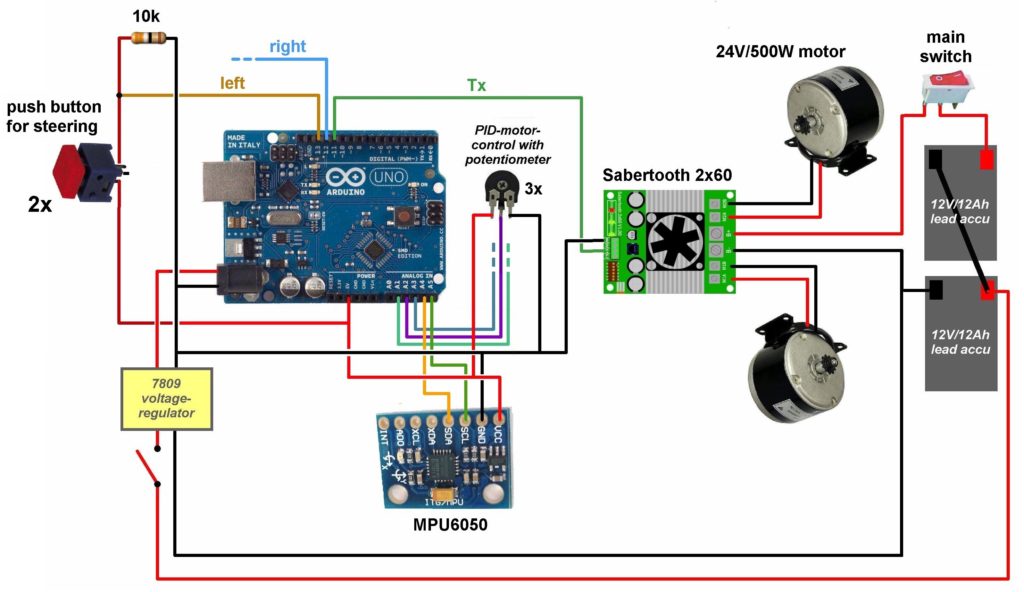
Zuerst hatte ich noch versucht, die beiden 250W-Motoren mit zwei selbst gebauten Vollbrücken und Arduino-PWM-Ansteuerung zu regeln. Die Ergebnisse damit waren aber ernüchternd. Deshalb habe ich mir einen komerziellen Motortreiber, den Sabertooth Dual 60A, besorgt. Dieser ist in der Lage, beide Motoren mit bis zu 60A dauerhaft zu befeuern.
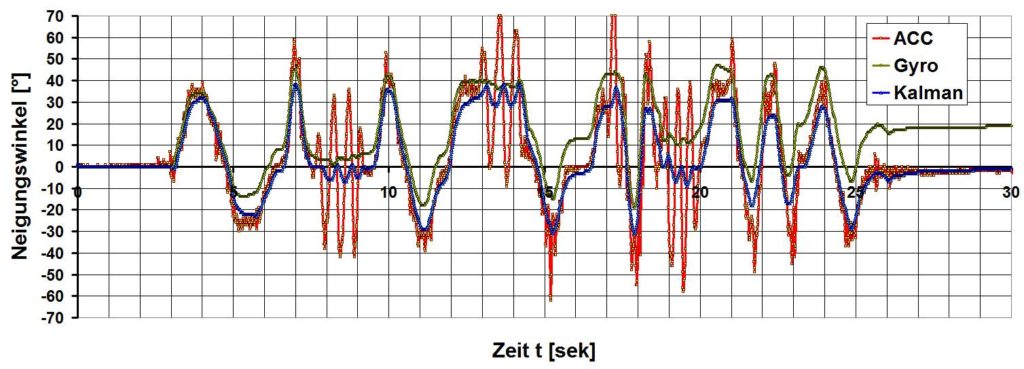
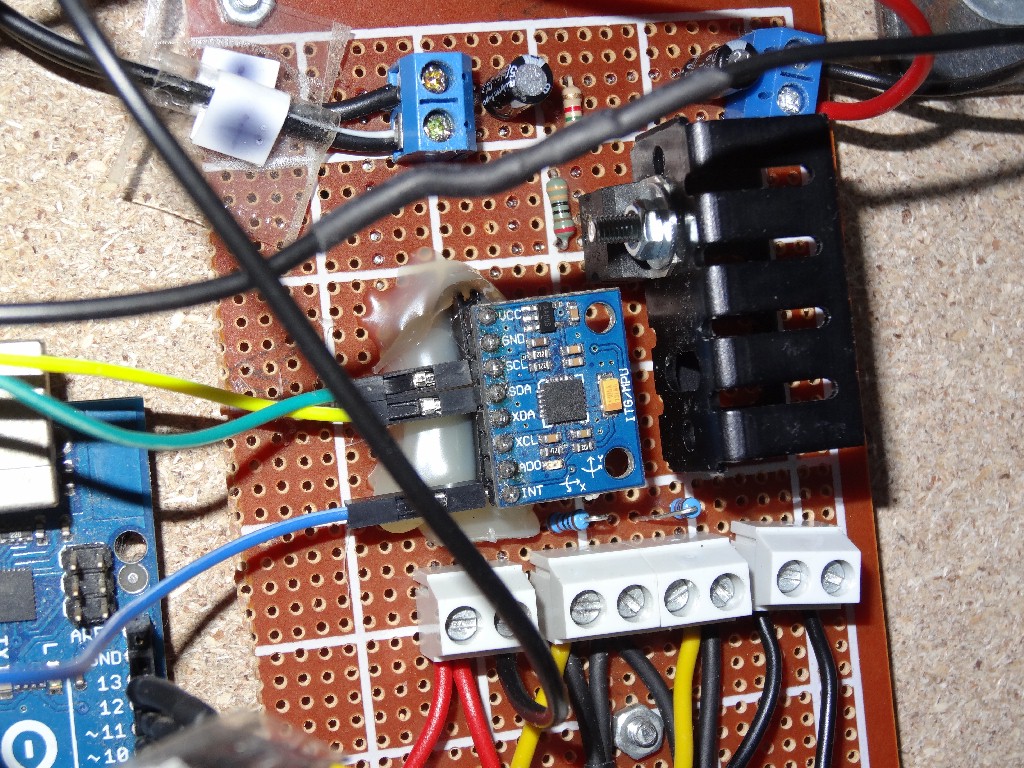
Bei der Bestimmung des Neigungswinkels kommt ein sog. Kalman-Filter zum Einsatz. Dieser nutzt die Beschleunigungs- und Winkelgeschwindigkeitswerte und kombiniert beide in idealer Weise. Mittels der Beschleunigungskomponenten in x- und z-Richtung könnte aufgrund der in z-Richtung wirkenden Erdbeschleunigung, der Neigungswinkel eigentlich prinzipiell sehr einfach berechnet werden. Man würde nur den arctan(a_x/a_z) benötigen. Leider beschleunigt aber das Segway auch und dadurch kommt es neben der Erdbeschleunigung noch zu weiteren Beschleunigungskomponenten. Hier kommt das Gyroskop im Sensor vom Typ MPU6050 zum Einsatz. Integriert man die Winkelgeschwindigkeit nach der Zeit t auf, so erhält man den aktuellen Winkel. Zudem ist das Gyroskop unempfindlich auf Beschleunigungen. Dies hört sich sehr gut an, doch leider hat das Gyroskop bzw. die Zeitintegration einen entscheidenden Nachteil. Es kommt nämlich zu einem Drift des mit dem Gyroskop berechneten Winkels mit fortschreitender Zeit, sprich der berechnete Winkel weicht zusehends vom richtigen Wert ab.
Nur eine geschickte Kombination der Werte beider Sensoren, also Beschleunigungen und Winkelgeschwindigkeit, in Form des Kalmanfilters liefert sehr sichere Werte (siehe Excel-Abbildung).
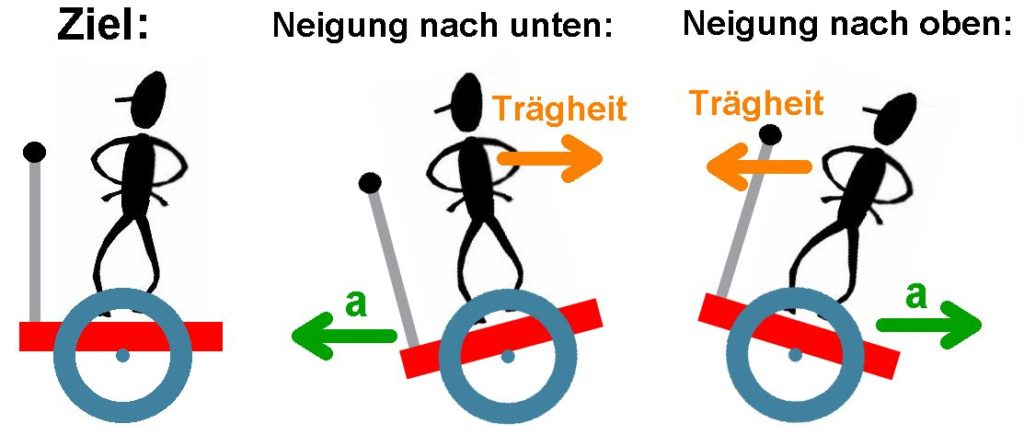
Wie steuert man nun ein Segway? Nun, möchte man etwa nach vorne beschleunigen, so neigt man sich nach vorne. Dies würde eigentlich zu einem nach vorne gerichteten Kippen der Person führen. Durch den entstandenen Neigungswinkel versucht nun das Segway durch Beschleunigung, diesen wieder auf 0 zu bringen. Durch diese Beschleunigung wirkt eine nach hinten gerichtete Trägheitskraft auf die fahrende Person. Dieses durch die Beschleunigung nach hinten wirkende Drehmoment und das durch die Neigung nach vorne wirkende Drehmoment heben sich genau auf.
Möchte man bremsen, so neigt sich der Fahrer nach hinten und das Segway stellt sich ein wenig auf. Dadurch kommt es zu einem nach hinten wirkenden Drehmoment, welches sich mit dem Trägheitsdrehmoment nach vorne wieder genau aufhebt.
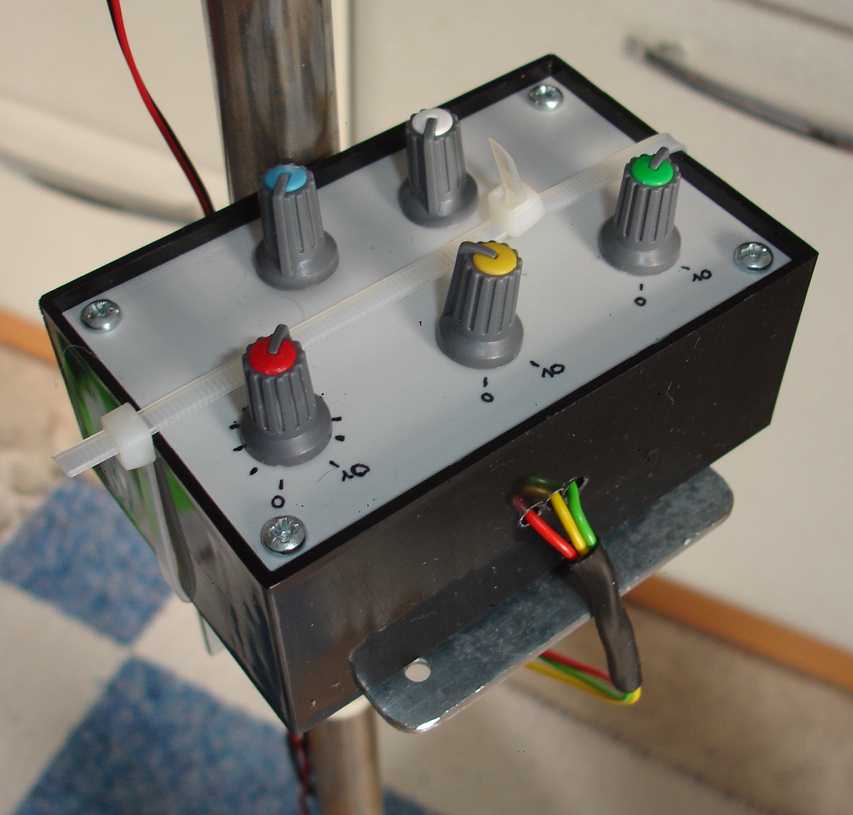
Die Kosten des gesamten Segways belaufen sich auf rund 500 Euro, wobei der Sabertooth Motortreiber mit gut 130 Euro die teuerste Einzelausgabe war. Gelenkt wird mittels zweier am Lenker befestigter Taster. An der Lenkstange befindet sich auch die Box mit den 3 PID-Reglern.
Zur Spannungsversorgung dienen zwei 12V Bleiakkus mit jeweils 12 Ah. Wie man im Video erkennen kann, sind die beiden 250W Motoren noch etwas zu schwach. Dies führt zu einem eher wackeligen Fahrverhalten. Aushilfe sollen daher 2 Stück 500W Elektromotoren verschaffen, die jedoch erst noch besorgt werden müssen.










Arduino-Code und Dateien:
Sabertooth 60A simplifiedArduinoLibrary
// -------------------------------------------------------------------------------------------------------------------------------------------------------------------------
// ------------ Programm zur Berechnung des Neigungswinkels aus den Gyro- und Beschleunigungsdaten unter Verwendung eines Kalman-Filters ----------------------------------
// -------------------------- und PID-Regelung zur seriellen Ansteuerung der beiden Motoren mittels Sabertooth-Motortreiber -----------------------------------------------
// -------------------------------------------------------------------------------------------------------------------------------------------------------------------------
#include "Wire.h"
#include "I2Cdev.h" // I2Cdev and MPU6050 must be installed as libraries
#include "MPU6050.h" // class default I2C address is 0x68 = AD0 low
#include <math.h>
#include <SoftwareSerial.h>
#include <SabertoothSimplified.h>
SoftwareSerial SWSerial(NOT_A_PIN, 11); // RX on no pin (unused), TX on pin 11 (to S1).
SabertoothSimplified ST(SWSerial); // Use SWSerial as the serial port.
MPU6050 accelgyro;
int16_t ax, ay, az; // Beschleunigungswerte in x-,y- und z-Richtung des MPU6050-Sensors
int16_t gx, gy, gz; // Winkelgeschwindigkeitswerte in x-,y- und z-Richtung des MPU6050-Sensors
#define Pin_Lenkung_rechts 12 // Pin-Anschluss für den Lenkbefehl Rechts
#define Pin_Lenkung_links 13 // Pin-Anschluss für den Lenkbefehl Links
#define Pin_Schalter_Box 3 // Pin-Anschluss des Box-Schalters, um zwischen Motorsynchronisation und I-Regelung zu wählen
#define Pin_PID_Regelung_P A1 // Pin-Anschluss für das Poti zur Veränderung des P-Anteils
#define Pin_PID_Regelung_I A2 // Pin-Anschluss für das Poti zur Veränderung des I-Anteils
#define Pin_PID_Regelung_D A3 // Pin-Anschluss für das Poti zur Veränderung des D-Anteils
int LoopTime_Soll = 9; // gewünschte Schleifendauer in ms um auf die 100 Hz zu gelangen
int LoopTime_Angepasst = LoopTime_Soll; // letzte Schleifenzeit mit erzwungener Pause
int LoopTime_Bisher = LoopTime_Soll; // letzte Schleifenzeit ohne erzwungener Pause
unsigned long LoopTime_Start = 0; // Startzeit der Schleife
float Winkel; // aktueller Neigungswinkel
float Winkel_Soll; // Sollwert des Neigungswinkels, also 0°
float Winkel_Grenze; // maximal erlaubter Neigungswinkel, über dem das Segway abgeschaltet wird
float ACC_angle; // Winkel vom Beschleunigungssensor
float GYRO_rate; // Winkelgeschwindigkeit vom Gyro-Sensor
float Kp,Ki,Kd,K; // Konstanten zur PID-Regelung, Differentteil, Integralteil, Differentialteil, Gesamtanteil
int Motor; // von der PID-Regelung erhaltener Wert zur Motoransteuerung
int Motor_rechts, Motor_links; // Werte für die beiden Motoren
float K_Motor_links, K_Motor_rechts; // Korrekturfaktoren für einen synchronen Lauf der beiden Motoren
int Schalter_Box; // Variable, welche die Schalterstellung an der Box abfragt
int Lenkung_Eingang_rechts = 0; // Variable zum Erfassen eines Lenkbefehls nach Rechts
int Lenkung_Eingang_links = 0; // Variable zum Erfassen eines Lenkbefehls nach Links
float Lenkung_max; // Wert, um den sich die Motoransteuerung bei einem Lenkbefehl maximal ändern soll
float Lenkung_rechts, Lenkung_links; // aktueller und schrittweise erhöhter Ansteuerungswert beim Lenken nach rechts bzw. links
// ****************************************************************************
// ****************************** SETUP ***************************************
// ****************************************************************************
void setup()
{
Wire.begin();
//SWSerial.begin(9600); // This is the baud rate you chose with the DIP switches.
Serial.begin(9600); // baud rate für den seriellen Monitor, um die Werte zu überprüfen
// initialize device
accelgyro.initialize();
calibrateSensors(); // Unterprogramm zum einmaligen Kalibrieren der Sensoren
}
// ***********************************************************************************
// ****************************** Kalibrierung ***************************************
// ***********************************************************************************
void calibrateSensors() // einmalige Ermittlung der Sensor-Nullwerte (Mittelwert aus jeweils 50 Messungen)
{
// =================================================
// ======== Änderung der Sensor-Auflösung ==========
// =================================================
// ===========================================================================
// read raw accel/gyro measurements from device
// Ausgabewerte-Acc: Auflösung 2g: 16384/g Auflösung 4g: 8192/g
// Ausgabewerte-Gyro: Auflösung 250°/s: 131/°/s Auflösung 500°/s: 65.5/°/s
// ===========================================================================
accelgyro.setFullScaleAccelRange(MPU6050_ACCEL_FS_2);
accelgyro.setFullScaleGyroRange(MPU6050_GYRO_FS_500);
// Versuch, das "Aufheulen" der beiden Motoren zu Beginn zu vermeiden
ST.motor(1, 0);
ST.motor(2, 0);
Winkel_Soll = 0.0; // Sollwert für den Neigungswinkel
Winkel_Grenze = 30.0; // maximal erlaubter Neigungswinkel
// *******************************************************
// ********** K - Werte für die PID-Regelung *************
// *******************************************************
Kp = analogRead(Pin_PID_Regelung_P) * 25.0 / 1023.0; // Differenzenanteil mit Poti festgelegt
Ki = 0.1; // Integralanteil mit Poti festgelegt (Schalter aber womöglich auf Motorkorrektur, daher mit 0.1 zunächst festgesetzt)
Kd = analogRead(Pin_PID_Regelung_D) * 100.0 / 1023.0; // Differentialanteil mit Poti festgelegt
K = 1.0; // Gesamtanteil
// **************************************************
// ********** K - Werte für die Motoren *************
// **************************************************
pinMode(Pin_Schalter_Box, INPUT); // Pin für die Auswahl zwischen I-Regelung und Motorsynchronisation
K_Motor_rechts = 1.0; // Korrekturfaktor für den rechten Motor
K_Motor_links = 0.8; // Korrekturfaktor für den linken Motor
// **********************************************
// ********** Werte für die Lenkung *************
// **********************************************
Lenkung_max = 25.0; // Wert, um den sich die Motoransteuerung bei einem Lenkbefehl MAXIMAL ändern soll
Lenkung_rechts = 0.0; // aktueller Zusatzwert beim Lenkvorgang nach rechts
Lenkung_links = 0.0; // aktueller Zusatzwert beim Lenkvorgang nach links
pinMode(Pin_Lenkung_rechts, INPUT); // Pin für Lenkung nach Rechts wird als Input deklariert
pinMode(Pin_Lenkung_links, INPUT); // Pin für Lenkung nach Links wird als Input deklariert
}
// ***************************************************************************************************************************************************
// ***************************************************************************************************************************************************
// ********************************************************************** HAUPTSCHLEIFE **************************************************************
// ***************************************************************************************************************************************************
// ***************************************************************************************************************************************************
void loop()
{
// *******************************************************
// ********************* Sensorabfrage *******************
// *******************************************************
// ===========================================================================
// read raw accel/gyro measurements from device
// Ausgabewerte-Acc: Auflösung 2g: 16384/g Auflösung 4g: 8192/g
// Ausgabewerte-Gyro: Auflösung 250°/s: 131/°/s Auflösung 500°/s: 65.5/°/s
// ===========================================================================
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
ACC_angle = atan(ay * 1.0 / az * 1.0) * 180.0 / 3.141592654; // Auflösung 2g: 16384/g
//ACC_angle = atan((ay/16384.0) / (az/16384.0)) * 180.0 / 3.141592654; // Auflösung 2g: 16384/g
GYRO_rate = gx/65.5; // Auflösung 500°/s: 65.5/°/s
// *******************************************************
// ********** K - Werte für die PID-Regelung *************
// *******************************************************
Kp = analogRead(Pin_PID_Regelung_P) * 25.0 / 1023.0; // Differenzenanteil mit Poti festgelegt; Maximum = 25
Kd = analogRead(Pin_PID_Regelung_D) * 100.0 / 1023.0; // Differentialanteil mit Poti festgelegt; Maximum = 100
Schalter_Box = digitalRead(Pin_Schalter_Box); // Abfrage des Pins für den Schalterzustand an der Box
if (Schalter_Box == HIGH) // Mittels Schalter an der Box I-Regelung aktiviert
{
Ki = analogRead(Pin_PID_Regelung_I) * 2.0 / 1023.0; // Integralanteil mit Poti festgelegt; Maximum = 2
}
else // Mittels Schalter an der Box Motor-Regelung aktiviert
{
K_Motor_rechts = analogRead(Pin_PID_Regelung_I) * 2.0 / 1023.0; // Korrekturfaktor für einen synchronen Lauf der beiden Motoren; Maximum = 2
}
// ********************************************************************************
// ****************** Kalmanfilter, PWM-Berechnung und Motorwerte *****************
// ********************************************************************************
Winkel = kalmanCalculate(ACC_angle, GYRO_rate, LoopTime_Angepasst); // mit Kalmanfilter berechneter Winkel
if (Winkel > Winkel_Grenze || Winkel < (Winkel_Grenze * (-1)))
{
// ===============================================
// Abbruch aufgrund des zu großen Neigungswinkels!
// ===============================================
ST.motor(1, 0);
ST.motor(2, 0);
}
else
{
// =========================
// Neigungswinkel in Ordnung
// =========================
Motor = pid(Winkel, Winkel_Soll, GYRO_rate); // Berechnung des PWM-Werts zur Ansteuerung der Motoren
Motor_rechts = K_Motor_rechts * Motor; // Berechnung der mittels K-Faktor synchronisierten Motordrehzahl für den rechten Motor
Motor_links = K_Motor_links * Motor; // Berechnung der mittels K-Faktor synchronisierten Motordrehzahl für den linken Motor
// **************************************************************************************
// ***** Abfrage ob die Lenkung betätigt wurde und Veränderung der Motoransteuerung *****
// **************************************************************************************
Lenkung_Eingang_rechts = digitalRead(Pin_Lenkung_rechts); // Abfrage des Pins für Lenkung nach Rechts
if (Lenkung_Eingang_rechts == HIGH)
{
// ******************************************
// *** Lenkung nach Rechts wurde gedrückt ***
// ******************************************
if (Motor_rechts >= 0) // segway fährt gerade vorwärts oder steht. Welcher Motor abgefragt wird, ist egal.
{
Motor_rechts = Motor_rechts - (int)Lenkung_rechts; // Vielleicht auch mit Multiplikation eines Faktors (z.B. * (1 - 0.1) versuchen
Motor_links = Motor_links + (int)Lenkung_rechts; // Vielleicht auch mit Multiplikation eines Faktors (z.B. * (1 + 0.1)) versuchen
}
else // segway fährt gerade rückwärts
{
Motor_rechts = Motor_rechts + (int)Lenkung_rechts; // Vielleicht auch mit Multiplikation eines Faktors (z.B. * (1 + 0.1) versuchen
Motor_links = Motor_links - (int)Lenkung_rechts; // Vielleicht auch mit Multiplikation eines Faktors (z.B. * (1 - 0.1) versuchen
}
Lenkung_rechts = Lenkung_rechts + 0.05; // Besser nur um z.B. 0.1 pro Abfrage erhöhen, damit Lenkung nicht zu abrupt erfolgt!
if (Lenkung_rechts > Lenkung_max) Lenkung_rechts = Lenkung_max; // Maximaler Lenkungswert darf nicht überschritten werden!
//Lenkung_rechts = constrain(Lenkung_rechts, 0, Lenkung_max); // rechter Lenkungswert ins Intervall [0,Lenkung_max] gebracht
}
else
{
Lenkung_rechts = 0.0;
}
Lenkung_Eingang_links = digitalRead(Pin_Lenkung_links); // Abfrage des Pins für Lenkung nach Links
if (Lenkung_Eingang_links == HIGH)
{
// *****************************************
// *** Lenkung nach Links wurde gedrückt ***
// *****************************************
if (Motor_links >= 0) // segway fährt gerade vorwärts oder steht. Welcher Motor abgefragt wird ist egal.
{
Motor_rechts = Motor_rechts + (int)Lenkung_links; // Vielleicht auch mit Multiplikation eines Faktors (z.B. * (1 + 0.1) versuchen
Motor_links = Motor_links - (int)Lenkung_links; // Vielleicht auch mit Multiplikation eines Faktors (z.B. * (1 - 0.1) versuchen
}
else // segway fährt gerade rückwärts
{
Motor_rechts = Motor_rechts - (int)Lenkung_links; // Vielleicht auch mit Multiplikation eines Faktors (z.B. * (1 - 0.1) versuchen
Motor_links = Motor_links + (int)Lenkung_links; // Vielleicht auch mit Multiplikation eines Faktors (z.B. * (1 + 0.1) versuchen
}
Lenkung_links = Lenkung_links + 0.05; // Besser nur um z.B. 0.1 pro Abfrage erhöhen, damit Lenkung nicht zu abrupt erfolgt!
if (Lenkung_links > Lenkung_max) Lenkung_links = Lenkung_max; // Maximaler Lenkungswert darf nicht überschritten werden!
//Lenkung_links = constrain(Lenkung_links, 0, Lenkung_max); // linker Lenkungswert ins Intervall [0,Lenkung_max] gebracht
}
else
{
Lenkung_links = 0.0;
}
// *******************************************************************************************
// ******************************** Ansteuern der Motoren ***********************************
// *******************************************************************************************
Motor_rechts = constrain(Motor_rechts, -127, 127); // rechter Motorenwert ins Intervall [-127,127] gebracht
Motor_links = constrain(Motor_links, -127, 127); // linker Motorenwert ins Intervall [-127,127] gebracht
/*
// Gebrauch einer Wurzelfunktion anstelle der linearen Ansteuerfunktion zur Verbesserung des Ansprechverhaltens bei niedrigen Motorwerten
// ======================================================================================================================================
if (Motor_rechts >= 0) // rechter Motor dreht vorwärts
{
Motor_rechts = sqrt(127 * Motor_rechts); // zur Verbesserung des Ansprechverhaltens bei niedrigen Motorwerten
ST.motor(2, Motor_rechts);
}
else // rechter Motor dreht rückwärts
{
Motor_rechts = -sqrt(127 * -Motor_rechts); // zur Verbesserung des Ansprechverhaltens bei niedrigen Motorwerten
ST.motor(2, Motor_rechts);
}
if (Motor_links >= 0) // linker Motor dreht vorwärts
{
Motor_links = sqrt(127 * Motor_links); // zur Verbesserung des Ansprechverhaltens bei niedrigen Motorwerten
ST.motor(1, Motor_links);
}
else // linker Motor dreht rückwärts
{
Motor_links = -sqrt(127 * -Motor_links); // zur Verbesserung des Ansprechverhaltens bei niedrigen Motorwerten
ST.motor(1, Motor_links);
}
*/
ST.motor(1, Motor_links);
ST.motor(2, Motor_rechts);
}
// ************************************************************************
// *********************** Ausgabe der Messwerte **************************
// ************************************************************************
Werteausgabe();
// ******************************************************************
// *********************** Tastaturabfrage **************************
// ******************************************************************
// Tastatureingabe();
// **********************************************************************
// *********************** loop timing control **************************
// **********************************************************************
LoopTime_Bisher = millis() - LoopTime_Start; // Zeit seit der letzten Schleife
if(LoopTime_Bisher < LoopTime_Soll)
{
delay(LoopTime_Soll - LoopTime_Bisher); // Verzögerung, um die gleiche Schleifenzeit zu erhalten
}
LoopTime_Angepasst = millis() - LoopTime_Start; // aktualisierte Dauer der letzten Schleife, sollte gleich LoopTime_Soll = z.B. 10 msek sein!
LoopTime_Start = millis(); // neue Starteit der Schleife
}
// ********************************************************************************************
// ****************** Werteausgabe an die serielle Schnittstelle ******************************
// ********************************************************************************************
void Werteausgabe()
{
/*
Serial.print(Winkel);
Serial.print(" ");
Serial.println(Motor);
Serial.print(" ");
*/
Serial.print("a_y = ");
Serial.print(ay/16384.0);
Serial.print(" a_z = ");
Serial.print(az/16384.0);
Serial.print(" ACC_angle = ");
Serial.print(ACC_angle,0);
Serial.print(" GYRO_rate = ");
Serial.print(GYRO_rate,0);
Serial.print(" Winkel: ");
Serial.println(Winkel,0);
/*
Serial.print(" Motor: ");
Serial.print(Motor);
Serial.print(" Motor_rechts: ");
Serial.print(Motor_rechts);
Serial.print(" Motor_links: ");
Serial.println(Motor_links);
*/
}
// ******************************************************************************************************
// ***************************************** PID-Steuerung **********************************************
// ******************************************************************************************************
float error;
float last_error = 0;
float pTerm;
float iTerm;
float dTerm;
float integrated_error = 0;
int GUARD_GAIN = 40; // maximal aufintegrierter Winkelfehler
int pid(float Winkel_aktuell, float Winkel_Vorgabe, float Winkelgeschwindigkeit)
{
error = Winkel_Vorgabe - Winkel_aktuell;
pTerm = Kp * error; // Differenzenanteil
integrated_error = integrated_error + error;
iTerm = Ki * constrain(integrated_error, -GUARD_GAIN, GUARD_GAIN); // Integralanteil
dTerm = Kd * Winkelgeschwindigkeit / 100.0; // Differentialanteil; :100 um auf brauchbare Werte zu kommen!
/*
Serial.print(" K_p: ");
Serial.print(pTerm);
Serial.print(" K_d: ");
Serial.println(dTerm);
*/
last_error = error;
// Serial.println(K*(pTerm + iTerm + dTerm));
return constrain(K*(pTerm + iTerm + dTerm), -127, 127); // Ausgabe des Motorwerts für die beiden Motoren innerhalb der Grenzen [-127,127]
}
// ******************************************************************************************************
// ************************************** Kalman filter module ******************************************
// ******************************************************************************************************
float Q_angle = 0.001; // E(alpha2) = 0.001
float Q_gyro = 0.003; // E(bias2) = 0.003
float R_angle = 0.001; // Sz = 0.03 !!! je größer die Zahl, desto unempfindlicher reagiert der Winkel auf Veränderungen !!!
float x_angle = 0;
float x_bias = 0;
float P_00 = 0, P_01 = 0, P_10 = 0, P_11 = 0;
float dt, y, S;
float K_0, K_1;
float kalmanCalculate(float newAngle, float newRate, int looptime)
{
dt = float(looptime)/1000; // dt in Sekunden
x_angle = x_angle + dt * (newRate - x_bias);
P_00 = P_00 - dt * (P_10 + P_01) + Q_angle * dt;
P_01 = P_01 - dt * P_11;
P_10 = P_10 - dt * P_11;
P_11 = P_11 + Q_gyro * dt;
y = newAngle - x_angle;
S = P_00 + R_angle;
K_0 = P_00 / S;
K_1 = P_10 / S;
x_angle += K_0 * y;
x_bias += K_1 * y;
P_00 -= K_0 * P_00;
P_01 -= K_0 * P_01;
P_10 -= K_1 * P_00;
P_11 -= K_1 * P_01;
return x_angle;
}
// ********************************************************************
// ******** Tastaturabfrage zur Veränderung der PUI-Parameter *********
// ********************************************************************
int Tastatureingabe()
{
if(!Serial.available()) return 0;
char param = Serial.read(); // get parameter byte
if(!Serial.available()) return 0;
char cmd = Serial.read(); // get command byte
Serial.flush();
switch (param)
{
case 'p':
if(cmd=='+') Kp++;
if(cmd=='-') Kp--;
break;
case 'i':
if(cmd=='+') Ki += 0.1;
if(cmd=='-') Ki -= 0.1;
break;
case 'd':
if(cmd=='+') Kd++;
if(cmd=='-') Kd--;
break;
case 'k':
if(cmd=='+') K += 0.2;
if(cmd=='-') K -= 0.2;
break;
case 'l':
if(cmd=='+') K_Motor_links += 0.1;
if(cmd=='-') K_Motor_links -= 0.1;
break;
case 'r':
if(cmd=='+') K_Motor_rechts += 0.1;
if(cmd=='-') K_Motor_rechts -= 0.1;
break;
default:
Serial.print("?"); Serial.print(param);
Serial.print(" ?"); Serial.println(cmd);
}
Serial.println();
Serial.print("K:"); Serial.print(K);
Serial.print(" Kp:"); Serial.print(Kp);
Serial.print(" Ki:"); Serial.print(Ki);
Serial.print(" Kd:"); Serial.print(Kd);
Serial.print(" K_Motor_links:"); Serial.print(K_Motor_links);
Serial.print(" K_Motor_rechts:"); Serial.println(K_Motor_rechts);
}
